U.S. Pat. No. 8,570,320
Using a Three-Dimensional Environment Model in Gameplay
AssigneeMicrosoft Technology Licensing LLC
Issue DateJanuary 31, 2011
Illustrative Figure
Abstract
Use of a 3D environment model in gameplay is described. In an embodiment, a mobile depth camera is used to capture a series of depth images as it is moved around and a dense 3D model of the environment is generated from this series of depth images. This dense 3D model is incorporated within an interactive application, such as a game. The mobile depth camera is then placed in a static position for an interactive phase, which in some examples is gameplay, and the system detects motion of a user within a part of the environment from a second series of depth images captured by the camera. This motion provides a user input to the interactive application, such as a game. In further embodiments, automatic recognition and identification of objects within the 3D model may be performed and these identified objects then change the way that the interactive application operates.
Description
Like reference numerals are used to designate like parts in the accompanying drawings. DETAILED DESCRIPTION The detailed description provided below in connection with the appended drawings is intended as a description of the present examples and is not intended to represent the only forms in which the present example may be constructed or utilized. The description sets forth the functions of the example and the sequence of steps for constructing and operating the example. However, the same or equivalent functions and sequences may be accomplished by different examples. FIG. 1is a schematic diagram of a person100standing in a room and holding a mobile depth camera102which in communication with (and may be considered to form part of) an interactive computing system103, such as a gaming system. The room contains various objects106(such as a chair, table, door, window, plant and light), another person104, a display105and a cat108. The display105may, for example, be a television or computer monitor or may alternatively be any other form of display capable of displaying a graphical user interface (GUI) of the interactive computing system103, including eyewear which incorporates a display or a projected display. Many of the objects106are static although some of the objects such as the people100,104and cat108may move. As the person100holding the mobile depth camera102moves around the room or moves the mobile depth camera102whilst standing still, the mobile depth camera captures depth images of the room and the objects. The mobile depth camera102is in communication with a dense 3D environment modeling system110(the environment in this case is the room), which may be part of the interactive computing system103. “Dense” in this example refers to a high degree of accuracy and resolution of the model resulting from the use of all or many of the points from the incoming depth maps to implicitly describe the surface. ...
Like reference numerals are used to designate like parts in the accompanying drawings.
DETAILED DESCRIPTION
The detailed description provided below in connection with the appended drawings is intended as a description of the present examples and is not intended to represent the only forms in which the present example may be constructed or utilized. The description sets forth the functions of the example and the sequence of steps for constructing and operating the example. However, the same or equivalent functions and sequences may be accomplished by different examples.
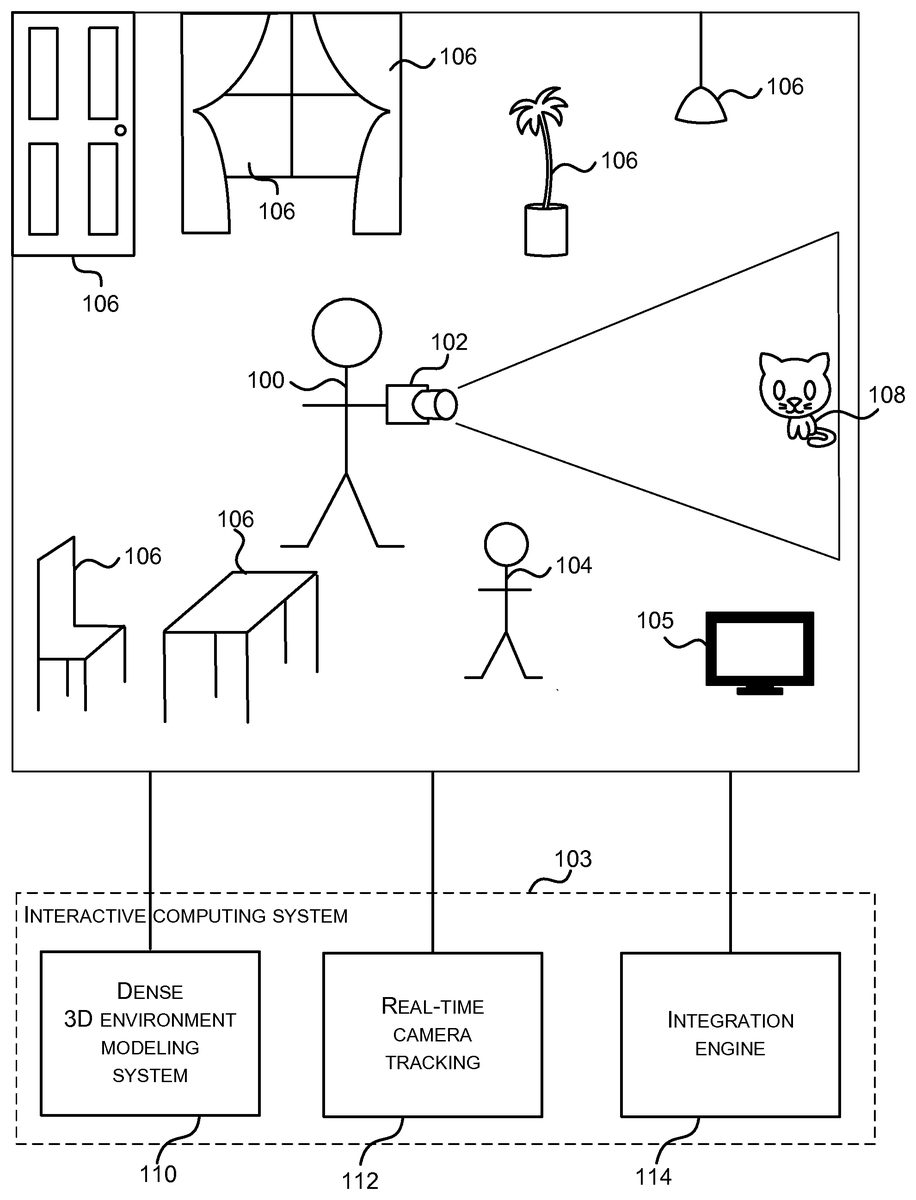
FIG. 1is a schematic diagram of a person100standing in a room and holding a mobile depth camera102which in communication with (and may be considered to form part of) an interactive computing system103, such as a gaming system. The room contains various objects106(such as a chair, table, door, window, plant and light), another person104, a display105and a cat108. The display105may, for example, be a television or computer monitor or may alternatively be any other form of display capable of displaying a graphical user interface (GUI) of the interactive computing system103, including eyewear which incorporates a display or a projected display. Many of the objects106are static although some of the objects such as the people100,104and cat108may move. As the person100holding the mobile depth camera102moves around the room or moves the mobile depth camera102whilst standing still, the mobile depth camera captures depth images of the room and the objects.
The mobile depth camera102is in communication with a dense 3D environment modeling system110(the environment in this case is the room), which may be part of the interactive computing system103. “Dense” in this example refers to a high degree of accuracy and resolution of the model resulting from the use of all or many of the points from the incoming depth maps to implicitly describe the surface. This can be contrasted with a “sparse” model that only takes a subset of the points to speed up calculations and reduce memory footprint. For example, images captured by the mobile depth camera102are used to form and build up a dense 3D model of the environment as the person moves about the room or moves the mobile depth camera102around.
A real-time camera tracking system112monitors the location and orientation of the camera102in the room. The real-time camera tracking system112may be integral with the mobile depth camera102or may be at another location, such as part of the interactive computing system103. Irrespective of where the real-time camera tracking system112is located, it is able to receive communication from the mobile depth camera102, either directly or indirectly. In an example, the real-time camera tracking system112may be provided at a computing device which is part of the interactive computing system103and may be in wireless communication with the mobile depth camera102. In other examples the real-time camera tracking system112may be elsewhere in the building or at another remote location in communication with the mobile depth camera102using a communications network of any suitable type.
The real-time camera tracking system112provides input to the dense 3D modeling system, in order to allow individual depth images to be built up into an overall 3D model. The real-time camera tracking system112may also track the position of the camera in relation to the 3D model of the environment. The combination of camera tracking and 3D modeling is known as simultaneous localization and mapping (SLAM).
The outputs of the real-time camera tracking system112and dense 3D modeling system110may be used by an integration engine114, which may comprise a gaming engine, augmented reality engine or any engine which enables integration of at least part of a dense 3D model of the environment into an application. For example, the integration engine may enable user interaction with an interactive application (which may be a game). For example, modeled real-world objects can be included in a gaming (or other interactive) environment and this is described in more detail below. In another example, a projector at the mobile depth camera102may be arranged to project images depending on the output of the real-time camera tracking system112and 3D modeling system110.
As a further example,FIG. 2illustrates a plan view of a floor200of a building. A person202holding a mobile depth camera204is moving around the floor as indicated by dotted arrows208. The person walks along a corridor206past rooms and furniture210. The real-time camera tracking system112is able to track the position of the mobile depth camera204as it moves and the 3D modeling system generates a 3D model or map of the floor. It is not essential for a person202to carry the mobile depth camera204. In other examples the mobile depth camera204is mounted on a robot or vehicle. This also applies to the example ofFIG. 1.
A flow diagram of an example of the operation of the interactive computing system103is shown inFIG. 3. A series of depth images are received from the mobile depth camera102as it is moved around an environment, such as the room shown inFIG. 1(block302). This series of depth images are then used to generate a dense 3D model of the environment (block304) and this 3D model (or part of the model) is then integrated within an interactive application which runs on the interactive computing system and with which a user can interact (block306). Where the interactive computing system103is a gaming system, the interactive application is a game and the 3D model (or a part of it) is integrated within the game. Once the 3D model has been integrated within the game, the model may be visible to the user or may be used within the game but not be visible to the user. The generation of the dense 3D model of the environment, which may also be referred to as a dense 3D background model, may be considered to be a first phase of operation of the interactive computing system (as indicated by dotted box31) and may be performed offline or in real-time as part of the application (e.g. game) or as a separate activity (e.g. as a set-up phase for the game or for the gaming system).
A second series of depth images are subsequently received from the mobile depth camera102when the camera is static (block308) and this second series of depth images are used to dynamically track real-time movement in 3D within the field of view (FOV) of the camera, which will represent only a region of the environment (e.g. only a part of the room) which was modeled in the first phase (block310). This region of the environment may be referred to as the ‘region of interest’ and in some implementations there may be a defined fixed position for the mobile depth camera during this stage in the operation of the system (e.g. above or below the display105inFIG. 1). The real-time sensing in a part of the environment (blocks308and310) may be considered to be a second phase of operation of the interactive computing system (as indicated by dotted box32). The real-time movement data, which may comprise raw data or processed data, such as data on identified user gestures, is provided as an input to the interactive application (block312). The second series of depth images may also (in real-time or subsequently) be used to update the 3D model which was generated previously (block314) and the updated model (or aspects of the updated model) may then be fed back into the application (as indicated by the dotted arrow from block314to block306).
The incorporation of the detailed model of the environment (which may be considered the background) into an interactive application, such as a game, improves the overall user experience and can increase the reality of the interaction. For example, where a user interacts with a virtual object in the interactive application, such as a ball, the movement and behavior of the ball can be adapted based on the dense 3D model. If the user kicks the virtual ball towards a wall or other object, the interactive application can modify the behavior of the virtual ball (as shown in the GUI of the application) based on the dense 3D model, such that the ball appears to bounce back from the wall. In another example, if the user kicks the virtual ball towards a smaller (real) object within the room, the ball may not necessarily bounce back but the trajectory of the virtual ball may be changed following its virtual impact with the real object. The characteristics of the particular smaller real object may be used in determining the resultant motion of the virtual ball, as is described in more detail below. Other aspects of the environment may also be incorporated into the interactive application, such as light from real light sources (e.g. the lamp or window inFIG. 1), shadows from objects (e.g. the plant inFIG. 1), etc.
Additionally, the incorporation of the detailed model of the environment into an interactive application (such as a game) may provide new user experiences. For example, a flight simulation game which is played out in the user's own home (e.g. in their living room which has been captured in the first phase) on a miniature scale (e.g. with the user flying in a simulated miniature plane). In another example, an interactive application (such as a game) may transform the room into a jungle or other alternative environment, e.g. with waterfalls rolling off the sofa, etc. In a further example, an interactive application (such as a game) may enable a user to incorporate their own home into a simulation game. In yet another example, the incorporation of the detailed model into an interactive application may enable a user to try out changes to home decoration, new furniture, etc within a virtual representation of the room before actually making the changes (e.g. painting the walls a different color, changing the color of the carpet, knocking down a wall, etc) or buying the new furniture etc. In an implementation, the interactive application may be provided by a home furnishings store (e.g. via their website) such that you can import depth data to be used in creating a model which is integrated within the application and then import items from the store into the virtual scene.
The system shown inFIG. 1comprises a single depth camera (mobile depth camera102) and the method shown inFIG. 3enables a single depth sensing device to be used to create a detailed 3D model of an environment and also to track real-time movement in 3D within a region of that larger environment. This provides a lower cost system than systems which comprise multiple depth sensing devices. The method ofFIG. 3may also be used in combination with a system which comprises multiple depth cameras and this is described in more detail below with reference toFIG. 8.
FIG. 4is a schematic diagram of a mobile environment capture device400for use with a real-time camera tracker416, dense model formation system424and an integration engine432(which may be a game engine). The mobile environment capture device400comprises a depth camera402which is arranged to capture sequences (or series) of depth images of a scene. Subsequent references to a depth camera may refer to a standalone depth camera or to a depth camera which is part of a mobile environment capture device as shown inFIG. 4. Depending on the technology used for depth sensing the depth camera may require additional components (e.g. an emitter404is required where the depth camera402detects infra-red structured light patterns) although such additional components may not necessarily be co-located with the depth camera.
Each depth image414(or depth map frame) comprises a two dimensional image in which each image element (i.e. pixel) comprises a depth value such as a length or distance from the camera to an object in the captured scene which gave rise to that image element. This depth value may be an absolute value provided in specified units of measurement such as meters, or centimeters or may be a relative depth value. In each captured depth image414there may be around 300,000 or more image elements each having a depth value. The frame rate of the depth camera402is high enough to enable the depth images to be used for working robotics, computer game or other applications (e.g. 20 frames per second or more).
The depth information may be obtained using any suitable technique including, but not limited to, time of flight, structured light, and stereo images. The mobile environment capture device400may also comprise an emitter404arranged to illuminate the scene in such a manner that depth information may be ascertained by the depth camera402.
For example, in the case that the depth camera402is an infra-red (IR) time-of-flight camera, the emitter404emits IR light onto the scene, and the depth camera402is arranged to detect backscattered light from the surface of one or more objects in the scene. In some examples, pulsed infrared light may be emitted from the emitter404such that the time between an outgoing light pulse and a corresponding incoming light pulse may be detected by the depth camera and measure and used to determine a physical distance from the environment capture device400to a location on objects in the scene. Additionally, in some examples, the phase of the outgoing light wave from the emitter404may be compared to the phase of the incoming light wave at the depth camera402to determine a phase shift. The phase shift may then be used to determine a physical distance from the mobile environment capture device400to a location on the objects by analyzing the intensity of the reflected beam of light over time via various techniques including, for example, shuttered light pulse imaging.
In another example, the mobile environment capture device400can use structured light to capture depth information. In such a technique patterned light (e.g. light displayed as a known pattern such as spots, a grid or stripe pattern, which may also be time-varying) may be projected onto a scene using the emitter404. Upon striking the surface of objects in the scene the pattern becomes deformed from the view point of a depth camera402which captures the pattern. The deformation in the captured pattern is analyzed to determine an absolute or relative distance from the depth camera402to the objects in the scene.
In another example, the depth camera402comprises a pair of stereo cameras such that visual stereo data is obtained and resolved to generate relative depth information. In this case the emitter404may be used to illuminate the scene or may be omitted.
In some examples, in addition to the depth camera402, the mobile environment capture device400comprises a color video camera referred to as an RGB camera406. The RGB camera406is arranged to capture sequences of images of the scene at visible light frequencies.
The mobile environment capture device400may comprise an orientation sensor408such as an inertial measurement unit (IMU), accelerometer, gyroscope, compass or other orientation sensor408. However, it is not essential to use an orientation sensor. The mobile environment capture device400may comprise a location tracking device such as a GPS, although this is not essential.
The mobile environment capture device may comprise a projector412as mentioned above, although this is not essential. The mobile environment capture device also comprises one or more processors, a memory and a communications infrastructure as described in more detail below. The mobile environment capture device may be provided in a housing which is shaped and sized to be hand held by a user or worn by a user. In other examples the mobile environment capture device is sized and shaped to be incorporated or mounted on a vehicle, toy or other movable apparatus. The mobile environmental camera may also be shaped so that it can be placed on a surface or bracket when operating in a fixed (or static) position (e.g. in the second phase, box32ofFIG. 3).
The mobile environment capture device400is connected to a real-time tracker416. This connection may be a physical wired connection or may use wireless communications. In some examples the mobile environment capture device400is connected indirectly to the real-time tracker416over one or more communications networks such as the internet.
The real-time tracker416is computer-implemented using a general purpose microprocessor controlling one or more graphics processing units (GPUs) or other parallel computing units. It comprises a frame alignment engine418and optionally a loop closure engine420and a relocalization engine422. The real-time tracker416takes depth image frames from the depth camera402, and optionally also input from the mobile environment capture device400, and optional map data434. The real-time tracker416operates to place the depth image frames into spatial alignment in order to produce a real-time series428of six degree of freedom (6DOF) pose estimates of the depth camera402. It may also produce transformation parameters for transforms between pairs of depth image frames. In some examples the real-time tracker operates on pairs of depth image frames414from the depth camera. In other examples, the real-time tracker416takes a single depth image414and aligns that with a dense 3D model426of the environment rather than with another depth image. An example of a method of real-time tracking is described in co-pending US patent application entitled ‘Real-time Camera Tracking Using Depth Maps’ filed on the same day as this application. This method is also described briefly below with reference toFIGS. 11 and 12.
The real-time tracker416provides the camera pose as output to a dense 3D model generation system424which uses that information together with the depth image frames to form and store a dense 3D model426of the scene or environment in which the mobile environment capture device400is moving. For example, in the case ofFIG. 1the 3D model would be a 3D model of the surfaces and objects in the room. In the case ofFIG. 2the 3D model would be a 3D model of the floor of the building. The dense 3D model may be stored in GPU memory. An example of a method of dense 3D model generation is described in co-pending US patent application entitled ‘Three-Dimensional Environment Reconstruction’ filed on the same day as this application. This method is also described briefly below with reference toFIGS. 13 and 14. Another example of a method of dense 3D model generation is described in a paper entitled ‘A Volumetric Method for Building Complex Models from Range Images’ by Curless and Levoy and published at SIGGRAPH '96.
The processing performed by the real-time tracker416and/or the dense 3D model formation system424can, in one example, be executed remotely from the location of the mobile environment capture device400. For example, the mobile environment capture device400can be connected to (or comprise) a computing device having relatively low processing power, and which streams the depth images over a communications network to a server. The server has relatively high processing power, and performs the computationally complex tasks of the real-time tracker416and/or the dense 3D model formation system424. The server can return a rendered image of the dense reconstruction per-frame to provide an interactive experience to the user, and also return the final dense 3D reconstruction on completion of the model, for subsequent local use (e.g. in a game). Such an arrangement avoids the need for the user to possess a high-powered local computing device.
In order to assist the user with building the dense 3D model, feedback can be provided to the user in the form of real-time renderings of the dense 3D model. This enables the user to view the state of the dense model as it is constructed, thereby assisting the user in capturing regions that have been missed. Colors and/or textures may be superimposed on the renderings in order to indicate to the user which regions of the environment need more data. This provides a more interactive experience for the user. Audio or visual cues can also be provided to the user to guide them to areas that have been missed or are of poor quality in the dense 3D model.
The mobile environment capture device400may be used in conjunction with an integration engine432(which may be a game engine) which is connected to a display device430. For example, the game may be a first-person shooter (FPS) game, golf game, boxing game, motor car racing game or other type of computer game. The dense 3D model may be provided to the integration engine432, and aspects of the model incorporated into the game, as described above with reference toFIG. 3. For example, the 3D model can be used to determine the shape and location of objects in a room which may then be incorporated into the game itself as in-game objects that the player can interact with or virtual objects within the game may interact (virtually) with objects within the environment (e.g. a virtual ball kicked by a player may appear to bounce back after hitting a wall of the room or other object in the environment). The integration engine432also uses the depth images captured during the second phase (e.g. during game play, where the integration engine is a game system), to track real-time movement in 3D in the region of interest and to use this movement as an input to an application, such as a game. The tracking of real-time movement using the depth images414may be performed using known techniques such as background removal followed by exemplar-based body part recognition (e.g. as described in co-pending US patent application entitled ‘Human Body Pose Estimation’, filed May 1, 2009, publication number US-2010-0278384-A1. Data from the integration engine432such as the game state or metadata about the game may also be provided to the real-time tracker416.
Map data434is optionally available to the real-time tracker416. For example, this may be an architect's drawing of the environment (e.g. room or floor of building), the location of landmarks known in the environment, a map of the environment available from another source.
The frame alignment engine418of the real-time tracker is arranged to align pairs of depth image frames, or a depth image frame and an estimate of a depth image frame from the dense 3D model. It uses an iterative process which is implemented using one or more graphics processing units in order that the frame alignment engine operates in real-time. The loop closure engine420is arranged to detect when the mobile environment capture device has moved in a loop so that the scene depicted in the current depth frame is at least partially overlapping with that of a previous depth frame. For example, this may occur when a user walks around the whole floor of the building inFIG. 2and reaches the starting point again. It may also occur when a user moves around a room behind some furniture and out again to the original start position, or close to that original start position. The relocalization engine422is arranged to deal with the situation where the real-time tracker loses the current location of the mobile environment capture device400and relocalizes or finds the current location again.
As mentioned, the processing performed by the real-time tracker416and/or the dense 3D model generation system424can, in one example, be executed remotely from the location of the mobile environment capture device400. For example, the mobile environment capture device400can be connected to (or comprise) a computing device having relatively low processing power, and which streams the depth images over a communications network to a server. The server has relatively high processing power, and performs the computationally complex tasks of the real-time tracker416and/or the dense 3D model generation system424. The server can return a rendered image of the dense reconstruction per-frame to provide an interactive experience to the user, and also return the final dense 3D reconstruction on completion of the model, for subsequent local use (e.g. in a game). Such an arrangement avoids the need for the user to possess a high-powered local computing device.
In the system and methods described above, the dense 3D model which is constructed based on the depth images captured while the mobile depth camera is in motion (phase1, box31inFIG. 3) is integrated into an application running on the interactive computing system and then a user may interact with the application (and the environment) through motion which is detected once the mobile depth camera has been set down and is therefore static (phase2, box32inFIG. 3). In some examples, instructions may be provided to the user by the system in relation to how to move the mobile depth camera in phase1and in other examples, the user may be free to move the mobile depth camera in any way. In a variation of the system and methods described above, the interactive computing system may also comprise an object recognition module502as shown in the schematic diagram ofFIG. 5. The objects recognized from within the 3D model by this module502may include active objects, such as the display device430or other peripherals504such as speakers, projectors, light sources etc, and passive objects, such as items of furniture.
FIG. 6shows a flow diagram of a part of the operation of the interactive computing system which involves use of the object recognition module502. This method may, for example, form part of the step of integrating the 3D model into an application (block306) inFIG. 3or may be performed by the integration engine following this step. The 3D model (as generated by the dense 3D model generation system424) is analyzed (block602) to look for recognizable objects. This may, for example, be performed by looking for particular features in the generated model or comparing parts of the model to stored templates, where these templates or particular features may be stored in an object database506. In an example, a generic ‘television’ template may be stored which defines the approximate shape of a television (e.g. approximately 10 cm in depth and having a width to height ratio of approximately 16:9). Any suitable image analysis or machine-learning method may be used to perform the analysis (in block602) and in some examples, training data may be stored in the object database506.
Depending upon the resolution of the dense 3D model, the object recognition module502may be able to identify embossed or engraved product logos to assist in object identification (e.g. the DELL (trademark) logo may indicate a computer or computer display). Where the mobile environment capture device400comprises an optional RGB camera406(as shown inFIG. 4) in addition to the depth camera402, RGB images may be used in combination with the 3D model to perform object recognition (e.g. for logo detection or to read barcodes or product IDs). Where an object to be recognized comprises a display, such as a television, computer monitor or mobile phone, a known particular pattern may be displayed on the device (and where the device is under the control of the system, this known pattern may be output by the system to the device) while scanning in, so that it can be detected easily in RGB. Similarly, for a projector, similarly, the projector may output a known pattern (optionally varying over time), either independently or under the control of the system, and by finding that RGB pattern in the world, the position of the projector within the room can be determined (e.g. using the room geometry which is known from the depth reconstruction). In some systems, markers (e.g. infra-red reflective markers) may be used to assist in object recognition/classification.
When an object has been recognized (‘Yes’ in block604), data about the object is input to the application running on the integration engine432(block606), which may, for example, be a game running on a game system. This data about the object may, for example, comprise an object type (e.g. ‘television’ or ‘display’) and location information (e.g. relative to the current position of the mobile depth camera or mobile environment capture device400). The application performance (or operation) is then adjusted based on the identified objects (block608).
There are many different ways that the application performance (or operation) may be adjusted based on the identified objects (in block608) and this may depend upon the type of object which has been identified. Where the object is an active object, such as a speaker, the audio output of the interactive computing system may be adjusted (block681) to take into consideration to location and spacing of speakers. In this way, the system may be able to simulate the effect of a surround sound system or a real surround system may be able to use the full 3D room reconstruction to calibrate and optimize its output. In some examples, where multiple speakers are identified it may be necessary to perform an additional step, such as emitting a sound from each speaker in sequence, to distinguish between the audio outputs from the interactive computing system and the detected speaker objects (the mobile environment capture device400may optionally comprise a microphone, not shown inFIG. 4). In some situations, this may not be necessary because this information may be able to be inferred from the size/shape of the detected speaker objects and/or from the relative positioning of the speakers. The detection of speakers and subsequent simulation of surround sound may, for example, be used to increase the reality of a gaming or augmented reality environment.
Another example of an active object is the display device430itself and using the knowledge of the relative position of the camera and display, automatic calibration of pointing devices may be performed (block682), as can be described with reference toFIG. 7. In many known systems, to calibrate a pointing device to a display702, it is necessary to point (and possibly press a button whilst pointing) at reticules704(or other markers) which are displayed in each of the corners of the display, as shown in the upper diagram inFIG. 7. In the system described herein, however, the integration engine knows the relative positions of the depth camera712, display714and pointing device716(such as a bat when playing a ball game or an imitation weapon when playing a FPS game) and so the position at which the user is pointing on the display (marked by arrow718in the lower diagram inFIG. 7) can be calculated (e.g. using trigonometry), without requiring the initial calibration phase (as shown in the upper diagram ofFIG. 7). Furthermore, based on the dense 3D model of the environment which has been generated, the integration engine can also determine what a user is pointing at within the environment, even where the user is not pointing at the display. This may, for example, enable a user to select a real object (e.g. by pointing at it) which is outside of the field of view of the mobile depth camera in its static position (in phase2) and import it into the game as an in-game object.
In a variation of that shown inFIG. 7and described above, the methods may be used to determine where a user is looking within the environment. As the system knows the relative position of the depth camera and the display, as well as the relative position of the user's head and eyes, the system can perform head tracking such that by moving their head a user can look around the GUI. This provides a very realistic and intuitive interface for exploring a virtual environment within a gaming or augmented reality application.
In another example, the GUI of the application may be adjusted based on the identified object (block683), for example, where a light source (such as the lamp or window shown inFIG. 1) is recognized, the GUI may be adjusted to simulate additional light in the displayed scene originating from the identified location of the light source. Where the detected object is a window, the GUI may be adapted to accommodate any glare which may be anticipated from sunlight through the window (e.g. based on time of day and time of year) or to simulate additional light, as in the previous example.
It will be appreciated that speakers and displays are just two examples of active objects and the system may recognize other active objects and then adjust the output to that active object from the application (in block608). The output to the active object may be adjusted based on the detected location of that object and/or on the detected position of other objects (in block685).
In a further example, the device may be an identified active object such as a projector and the output of the projector may be adjusted based on its determined location relative to other objects identified within the environment. This eliminates the need for a calibration stage and means that the system can adapt automatically to calibrate itself based on the detected locations of identified active objects. The projector may project visible images (or other GUI) and these may be adjusted based on the known position of the projector and its relative position to surfaces onto which the images will be projected, e.g. to compensate for surfaces not being flat or being angled with respect to the projector. The images may also be generated for projection based on the known position of the projector to provide a more immersive environment for the user and to extend the display from the main display, which may be a projected display or shown on a television, computer monitor or other display screen. In particular, the projected image may be adapted in real-time to the position of the user (e.g. the position of their face and eyes) such that a 3D effect is achieved and the image may be projected on arbitrary surface geometry.
In another example, the projector may project a structured light pattern for use in depth detection and the structured light pattern projected may be changed (in block685) based on the known position of the projector, e.g. relative to the current position of the mobile depth camera. In cases where the projection hits a flat surface at an angle the image may be pre-distorted in order to compensate any perspective distortions (also called keystone effect) of the projection image. In an example, the image is pre-distorted in two steps. First, the surface is projectively textured in the captured 3D model with the 2D projection image from a position orthogonal to the center of the projection surface. The textured 3D surface is then projected back to a 2D image using a virtual camera sharing the same extrinsic and intrinsic lens parameters as the projector. The projection may be undistorted relative a user rather than to a flat surface which allows the system to correct distortions on arbitrary non-planar surfaces. The technique described above may be modified by projectively texturing the surfaces (even non-planar) in the captured 3D model from the user's estimated eye position.
The examples described above have all been active objects; however, the application performance may also be adjusted based on the detection of passive objects such as items of furniture or indeed other animate objects (such as the other person104or the cat108shown inFIG. 1). Where a user is interacting with a virtual object, such as a ball, and throws/kicks this virtual object, a physics engine within the integration engine may be adjusted (block684) so as to more accurately simulate the interaction between the virtual object and the real object. If a virtual ball bounces off a wall it may move faster than if it had bounced off a softer object such as a sofa (also known as a couch). If the virtual ball accidentally comes into contact with the lamp106or the real cat108an appropriate sound effect may be simulated by the integration engine and played to the user (e.g. the sound of breaking glass or a cat's ‘miaow’).
Although object recognition is described above as being performed before the start of game play (or other user interaction in phase2), object recognition may in addition, or instead, be performed based on the second series of depth images which are generated when the depth camera is static (as received in block308ofFIG. 3). In such an example, the manner in which a user interacts with an object may be used to recognize or classify an object and this may use exemplar-based body part recognition methods or other methods. For example, an object which a user sits on may be identified by the object recognition module502as a chair or sofa.
It will be appreciated that the ways in which an application performance may be adjusted or adapted (in block608) based on identified objects described above provide just some examples. There are many ways in which adjustments may be made in order to improve user experience and increase the reality of the user interaction with the application once the objects have been identified from the dense 3D model and this information has been fed into the appropriate engine/module.
The systems described above comprise only a single depth camera, the mobile depth camera102,204,402, however, other example systems may also comprise one or more additional depth cameras802-806, as shown inFIG. 8, and in such an example system the methods described above (e.g. as shown inFIGS. 3 and 6) may also be used. Each of the depth cameras102,802-806in the system may be the same or they may be different (e.g. they may have different shaped fields of view, they may include combinations of wide-angle, short-throw and long-range depth cameras and/or they may include cameras using different technologies, such as structured light, time of flight, stereo, laser range finders, etc). The additional depth cameras802-806may be static cameras and therefore may have a different shaped housing to the mobile depth camera102, or one or more of the additional depth cameras802-806may also be a mobile depth camera. Each depth camera is connected to the interactive computing system using a wired or wireless connection.
In an implementation of such a system, the mobile depth camera102alone may be used to generate the dense 3D model of the environment (in block304ofFIG. 3) or series of images received from multiple depth cameras may be used. Furthermore, in the second phase (box32), images from all the depth cameras102,802-806or a subset of the cameras may be used to track real-time movement in 3D (in block310ofFIG. 3). In an example, separate real-time body part recognition is run for each depth camera and the result of the tracker with the highest confidence value is used in order to compensate occlusions of the user resulting from furniture, other users or themselves.
In an implementation of a system comprising multiple depth cameras, such as shown inFIG. 8, the method shown inFIG. 6may be used to detect the presence and location of the additional depth cameras802-806and to adjust the application performance based on their determined locations (in block608ofFIG. 6). Additionally each static camera may track the user individually in order to determine its relative orientation to the user. This knowledge may be used to resolve any ambiguities regarding the location of the cameras with respect to other static cameras. In this example, adjusting the application performance may comprise performing an automatic calibration of the system based on the known camera locations and this calibration may be used when detecting motion in real-time (e.g. in the second phase of operation, box32inFIG. 3, where series of images from multiple depth cameras are used).
Where the depth cameras are not identical, the object recognition (ofFIG. 6) may be used to detect the type of camera in addition to the presence and location of the camera. As described above, where the mobile depth camera is part of a mobile environment capture device which also comprises a RGB camera (e.g. as shown inFIG. 4), images captured by the RGB camera may also be used in identification of the type of camera. In other examples, other characteristics may be used to identify the type of camera, such as a particular marker or label on the device (e.g. an IR reflective marker).
In another variation, the automatic calibration based on the determined locations (or relative locations) of the multiple depth cameras may be performed by comparison of 3D models.FIG. 9is a flow diagram of an example method of automatic calibration of multiple depth cameras in which a separate dense 3D model is generated (in block904) using the series of depth images received from each depth camera (in block902), which includes the mobile depth camera where there one. The models may be generated using all the images in a series or from a subset of the images (e.g. to reduce the computation that is required). Once generated, the individual models are then compared to identify common sets of features which are visible in more than one model (block906) and based on the identification of a common set of features in two or more models, the relative positions of the cameras associated with each of the models can be computed (block908). In an example, where the environment comprises a cluttered surface, such as a coffee table with a number of objects on it, such a feature provides a good reference point for computing the relative position of cameras as there is likely to be little or no symmetry in the arrangement of objects. In an implementation of the method shown inFIG. 9, the identification of a common set of features may be implemented by identifying a particular arrangement of features in a first model (such as the cluttered coffee table) and then examining each other model to determine if the same arrangement of features is visible in the model. In an example implementation, descriptor vectors may be extracted at sparse interest points from each of the models and these are then matched to give initial correspondences between the different models. Finally some optimization over the transformation between the frames of reference (e.g. between two frames of reference where two models are being compared) is performed to bring them into alignment.
FIG. 10illustrates various components of an exemplary computing-based device1000which may be implemented as any form of a computing and/or electronic device, and in which embodiments of the methods described herein may be implemented.
Computing-based device1000comprises one or more processors1002which may be microprocessors, controllers or any other suitable type of processors for processing computing executable instructions to control the operation of the device in order to generate a dense 3D model of the environment from a first series of depth images, to use at least a part of that model in an application and to track real-time movement in a part of the environment from a second series of depth images for use as an input to the application. In some examples, for example where a system on a chip architecture is used, the processors1002may include one or more fixed function blocks (also referred to as accelerators) which implement a part of the methods described herein in hardware (rather than software or firmware).
The computing-based device1000may also comprise a graphics processing system1004, which communicates with the processors1002via a communication interface1006and comprises one or more graphics processing units (GPUs)1008which are arranged to execute parallel, threaded operations in a fast and efficient manner. The graphics processing system1004also comprises a memory device1010which is arranged to enable fast parallel access from the GPUs1008. In examples, the GPUs may be used in generating the dense 3D models, as described in more detail below.
The computing-based device100also comprises an input/output (I/O) interface1012arranged to receive and process input from one or more devices, such as the mobile environment capture device (comprising a depth camera), depth camera, and optionally one or more user input devices (e.g. a games controller, mouse, keyboard etc). The I/O interface1012may also operate as a communication interface, which can be arranged to communicate with one or more communication networks (e.g. the internet).
A display interface1014is also provided which is arranged to output display information to a display device which may be separate from or integral to the computing-based device1000. The display information may provide a graphical user interface, e.g. a graphical user interface for the application into which at least a part of the dense 3D model has been integrated. In an embodiment the display device may also act as a user input device if it is a touch sensitive display device and in such an instance the I/O interface1012and display interface1014may be combined into a single interface or the display device may be connected via both interfaces.
The computer executable instructions may be provided using any computer-readable media that is accessible by computing based device1000. Computer-readable media may include, for example, computer storage media such as memory1016and communications media. Computer storage media, such as memory1016, includes volatile and non-volatile, removable and non-removable media implemented in any method or technology for storage of information such as computer readable instructions, data structures, program modules or other data. Computer storage media includes, but is not limited to, RAM, ROM, EPROM, EEPROM, flash memory or other memory technology, CD-ROM, digital versatile disks (DVD) or other optical storage, magnetic cassettes, magnetic tape, magnetic disk storage or other magnetic storage devices, or any other non-transmission medium that can be used to store information for access by a computing device. In contrast, communication media may embody computer readable instructions, data structures, program modules, or other data in a modulated data signal, such as a carrier wave, or other transport mechanism. As defined herein, computer storage media does not include communication media. Although the computer storage media (memory1016) is shown within the computing-based device1000it will be appreciated that the storage may be distributed or located remotely and accessed via a network or other communication link (e.g. using I/O interface1012).
Platform software comprising an operating system1018or any other suitable platform software may be provided at the computing-based device to enable application software1020to be executed on the device. The memory1016may also store executable instructions to implement the functionality of one or more of the dense model integration engine1022, object recognition module1024, integration engine1026(e.g. a games engine) and camera tracking engine1028. The memory may also provide a data store1030which can be used to provide storage for data used by the processors1002e.g. to store the received series of depth images, to store the generated dense 3D models, to store data used in performing object recognition (e.g. to provide the object database506shown inFIG. 5), etc.
Co-pending US patent application entitled ‘Real-time Camera Tracking Using Depth Maps’ filed on the same day as this application, as referenced above in discussion ofFIG. 4, describes a method of real-time camera tracking using the depth maps generated by a depth camera and aspects of this method can be described with reference toFIGS. 4,11and12. In an example implementation, the frame alignment engine418ofFIG. 4is computer implemented at a computing device having one or more GPUs416or other parallel computing units. For example, the parallel computing units may be vector processors, single instruction multiple data (SIMD) architectures, graphics processing units or other parallel computing devices. It comprises an iterative closest point process and an optional plane extraction component. The iterative closest point process uses projective data association and a point-to-plane error metric. The frame alignment engine receives the current depth map from the depth camera. This is also referred to as the destination depth map. In some examples it also receives a source depth map which is the previous depth map frame from the depth camera. In other examples, the frame alignment engine takes a dense surface model estimate of the source depth map. The output of the frame alignment engine is a set of registration parameters of a transform for aligning the current and source frames (or frame estimate) and these parameters may be computed using the method shown inFIG. 11. In some examples these registration parameters are provided as an SE3 matrix (which is described in more detail below); however, the registration parameters may be provided in any suitable form. These registration parameters are used by the real time tracker416to produce the real-time series of 6 degree of freedom pose estimates of the depth camera.
FIG. 11is a flow diagram of an example iterative process at a frame alignment engine. An initial estimate of the registration parameters is formed1100. These are the registration parameters of a transform for aligning the current and source frames. This initial estimate is formed in any suitable manner. For example, one or more of the following sources of information may be used to form the initial estimate: game state, game meta data, map data, RGB camera output, orientation sensor output, GPS data, etc. In another example, the initial estimate is formed by predicting where the camera is using information about the previous motion path of the camera. For example, the camera may be assumed to have a constant velocity or a constant acceleration. The motion path of the camera from time 0 to time t−1 may be used to estimate where the camera will be at time t and thus obtain an estimate of the registration parameters.
Using the initial estimate, pairs of corresponding points between the current and source frames (depth maps or estimated depth maps) are computed1102. A pair of corresponding points is a point from one depth map and a point from another depth map, where those points are estimated to have arisen from the same real world point in a scene. The term “point” is used here to refer to a pixel, or a group or patch of neighboring pixels. This correspondence problem is very difficult because of the huge number of possible combinations of points. Previous approaches using color or grey-scale images have addressed this problem by identifying shapes such as lines, edges, corners or the like in each image and then trying to match those shapes between the pair of images. In contrast, the method shown inFIG. 12and described below identifies corresponding points without the need to find shapes in the depth maps. An updated estimate of the registration parameters is calculated1104which optimizes an error metric applied to the computed corresponding points. A check is made to assess whether convergence has been reached1106. If so, there is little or no change in the updated estimate and the registration parameters are output1108. If not, the iterative process repeats as indicated inFIG. 11.
With reference toFIG. 12more detail is now given about how the pairs of corresponding points are calculated. Surface normals of each available point are computed (block1202) and in an example this is achieved for a given point by finding the two (or more) nearest neighbor points in the depth map and computing a surface patch which incorporates those neighbors and the point itself. A normal to that surface patch is then calculated at the location of the point.
A process of finding corresponding pairs of points is then followed (block1204). This is now described in the case that the source and current depth maps are available without the use of a dense 3D model. For each sampled source point from the source depth map, a ray is projected (block1206) from the camera location associated with the source depth map, through the sampled source point and onto a destination point in the destination depth map. In some cases the destination point may be in front of the sampled source point along the projected ray. This projection process may be referred to as “projective data association”. A search (block1208) is then made for candidate corresponding points around and including the destination point. For example, the search is for points which have surface normals that are compatible with the surface normal of the sampled source point and which are within a specified Euclidean distance of the destination point. Surface normals are said to be compatible if they are within a specified range of one another. For example, this specified range and the Euclidean distance may be user configurable and/or set using empirical data relating to the particular application conditions concerned.
One or more candidate corresponding points are found as a result of this search (in block1208). From those candidate corresponding points a single point is selected (in block1210) to form a pair with the source point. This selection is made on the basis of a distance metric. For example, a Euclidean distance is calculated between the source point and each of the candidate corresponding points. The pair which gives the smallest Euclidean distance is then selected. The process of block604is then repeated for each of the sampled source points or in the case that no sampling is done, for each of the available points of the source depth map.
In some embodiments weights are assigned (in block1212) to each of the pairs of corresponding points. For example weights may be assigned using information from other sources such as an RGB camera or other sensors. In an example, a weight related to measurement characteristics of the depth camera such as radial lens distortion and/or depth dependent error is computed and stored with each of the pairs of corresponding points. In another example, pairs that include a point which is at an edge detected in the depth map using an edge detection algorithm are weighted higher than other pairs. These weights may be used during the process of applying the error metric in order to improve the quality of the results. For example, weights related to depth dependent error enable high depth values which are likely to fluctuate a lot due to the lack of precision to be taken into account.
In some embodiments pairs that include a point which is on or near a depth map boundary are rejected (block1214). This helps to avoid errors where overlap between the two depth maps is only partial. Other criteria may also be used to reject pairs. For example, in some embodiments plane extraction is carried out and in that case, pairs which are on a plane may be rejected in order to prevent the tracker being biased by a large plane and so ignoring smaller but unique parts within a depth map.
In some embodiments sample points are taken (in block1200) from either or both of the current and source depth maps and those sample points are used as candidates to find pairs of corresponding points from. In such an embodiment, surface normals are computed (in block1202) for each sampled point instead of each available point and then the process of block1204is implemented for each sampled source point. Sampling may be achieved by randomly selecting a specified proportion of the points. In another embodiment sampling (in block1200) is achieved in a manner which takes into account surface normals of the points and may therefore be performed after block1202. For example, a surface normal is calculated for each point (in block1202) and a histogram created with a plurality of bins for different ranges of surface normal values. Sampling is carried out so that a uniform sampling across the bins is achieved.
Co-pending US patent application entitled ‘Three-dimensional environment reconstruction’ filed on the same day as this application, as referenced above in discussion ofFIG. 4, describes a method of building up a 3D model of a real-world environment from data describing camera location and orientation and the depth maps generated by a depth camera and aspects of this method can be described with reference toFIGS. 4,13and14.
FIG. 13shows a flowchart of an example of a parallelizable process for generating a 3D environment model. In one example, the process ofFIG. 13is executed on a GPU processor, a multi-core processor, or other type of processor allowing a high degree of execution parallelism. In a further example, a single-core processor can also be used, if it is sufficiently fast. Firstly, a 3D volume is created (in block1300) on a memory device for storing the model. In one example, the 3D volume is created on the memory of a graphics processing system (e.g. system1004inFIG. 10), which enables fast, parallel access from a GPU.
The 3D volume can be visualized as a cuboid of memory, wherein each memory location is a voxel representing a point in space of the environment being modeled. Therefore, the 3D volume directly represents a spatial portion of the real-world environment. As the 3D volume corresponds directly to a real-world volume, the size of the real-world volume represented in a fixed-size memory determines the model resolution. For example, if a large real-world volume is to be modeled, then each voxel of the memory represents a larger region in real-world space, and hence the resolution is lower than if a smaller real-world volume is modeled. If more memory is available, however, the large real-world volume can be modeled at a higher resolution.
Once the 3D volume has been created in memory (in block1300), then the modeling process starts by receiving (in block1302) from the mobile environment capture device400a depth image414and the 6DOF pose estimate of the depth camera402when capturing that depth image. The 6DOF pose estimate indicates the location and orientation of the depth camera402, and can be provided by the real-time tracker416. In one example, the 6DOF pose estimate can be in the form of an SE3matrix describing the rotation and translation of the depth camera402relative to real-world coordinates. More formally, this transformation matrix can be expressed as:
Tk=[Rktk0T1]∈SE3
Where Tkis the transformation matrix for depth image frame k, Rkis the camera rotation for frame k, tkis the camera translation at frame k, and Euclidean group SE3:={R,t|RεSO3,tε3}. Coordinates in the camera space (i.e. from the camera perspective) can be mapped to real-world coordinates by multiplying by this transformation matrix.
A separate execution thread can be assigned (in block1304) to each voxel in a plane of the 3D volume. For example, if the plane of the volume is the z-plane, then an execution thread is assigned to each combination of x- and y-coordinate of the 3D volume. Each separate execution thread then performs the same operations, as indicated by dotted box1306inFIG. 13. The operations performed by each thread are illustrated diagrammatically inFIG. 14.FIG. 14shows a top-down view of the 3D volume1400(i.e. showing the x-axis1420and z-axis1422, and the y-axis is ignored for the purposes of clarity). An execution thread is assigned to each coordinate on the z-plane of the volume, denoted T11402, T21404, . . . Tn-161406, Tn1408. The operations performed by each thread in box1306are firstly illustrated with reference to T11402.
The z-coordinate for the execution thread is set (in block1308) to zero, and the x,y,z coordinates for the voxel associated with the thread are converted (in block1310) to real-world coordinates. For example, in the case of thread T11402, the x,y coordinate associated with the thread is (0,0), so when the z-coordinate is set to zero, this gives coordinates of (0,0,0) (i.e. voxel1410inFIG. 14) which can be converted to real-world coordinates. Once the real-world coordinates for voxel1410have been determined, they can be transformed using the 6DOF location and orientation of the depth camera to determine a corresponding location in the depth image414for this voxel. This means that the real-world coordinate for the current voxel associated with the thread is perspective projected through the depth camera's projection. In other words, if the voxel representing this point in the real-world is being viewed by the depth camera having its location and orientation, this determines what the coordinates are in the depth image414for that point. The depth camera-perspective coordinates for the voxel are denoted pX, pY, pZ. The depth camera-perspective coordinates can be converted to depth image pixel coordinates (denoted u,v) by u=pX/pZ and v=pY/pZ.
The perspective of the depth camera402is shown illustrated inFIG. 14by the dashed lines indicating the frustum1412of the depth camera402.FIG. 14also shows a surface1414in the depth image414output from the depth camera.
The depth image coordinates (u,v) for the voxel currently associated with the thread are used to determine (in block1314) whether the voxel is located within the frustum1412of the depth camera. If not, then this voxel can be skipped. With reference toFIG. 14, it is noted that, in the case of thread T1, the current voxel1410is within the frustum1412of the camera. This can be contrasted to, for example, the first voxel considered by thread Tn-1, which is outside the camera frustum1412, and hence skipped.
If it is determined that the current voxel is within the camera frustum1412, then a factor relating to the distance between the voxel and a point in the environment at the corresponding location to the voxel from the camera's perspective is determined. The point in the environment at the corresponding location can be given by the depth value in the depth image at (u,v). Therefore, with reference toFIG. 14, this factor considers distance1416between voxel1410and the point on surface1414in the depth image414that maps onto the voxel1410.
In one example, the factor calculated (in block1320) is a signed distance function. A signed distance function calculation gives the value of the distance between the current voxel and the corresponding point in the depth image414, and is signed such that voxels outside (i.e. external to) the corresponding point in the depth image (from the camera's perspective) are given a positive distance, and voxels inside (i.e. internal to) the corresponding point in the depth image (from the camera's perspective) are given a negative distance. A value of zero indicates that the associated voxel is exactly coincident with the corresponding point. The signed distance function can be calculated readily from the depth value at (u,v) in the depth image minus pZ. For example, voxel1410inFIG. 14is in front of the corresponding point on surface1414, and hence has a positive signed distance function value. Conversely, voxel1418inFIG. 14is behind its corresponding point on surface1414, and hence has a negative signed distance function value.
The signed distance function value is then normalized (in block1322) to a predefined distance value. In one example, this predefined value can be a small distance such as 5 cm, although any suitable value can be used. It is then determined (in block1324) whether the normalized distance is greater than a positive threshold value (if the signed distance is positive) or less than a negative threshold value (if the signed distance is negative). If so, then the signed distance function values are truncated (in block1326) to maximum or minimum values. For example, if the normalized distance is greater than the positive threshold value, then the value can be truncated at +1 (the positive threshold value after normalizing), and if the normalized distance is less than the negative threshold value, then the value can be truncated at −1 (the negative threshold value after normalizing). The result of this calculation is known as a truncated signed distance function (TSDF).
For example, referring toFIG. 14, voxel1410is a relatively large distance outside surface1414, and hence may be truncated to +1. Conversely, voxel1418is a relatively short distance inside surface1414, and hence may not be truncated, and keep its normalized distance (e.g. −0.6 for example).
The normalized (and if appropriate, truncated) signed distance function value is then combined with any previous value stored at the current voxel. In the case that this is the first depth image incorporated into the 3D volume, then no previous values are present. However, as further frames from the depth camera are received and incorporated, then values can already be present at a voxel.
In one example, the signed distance function value is combined with a previous value by averaging (block1328). This can assist with building models of environments with moving objects, as it enables an object that has moved to disappear over time as the measurement that added it becomes older and averaged with more recent measurements. For example, an exponentially decaying moving average can be used. In another example, the average can be a weighted average that uses a weighting function relating to the distance of the associated voxel from the depth camera. The averaged signed distance function values can then be stored (in block1330) at the current voxel.
In an alternative example, two values can be stored at each voxel. A weighted sum of the signed distance function values can be calculated and stored, and also a sum of the weights calculated and stored. The weighted average can then be computed as (weighted sum)/(sum of weights).
It is then determined (in block1316) whether all the z-planes of the 3D volume have been considered by this thread. If not, then the z-coordinate is incremented (block1318), and the process repeats for the next voxel in the z direction. In other words, the thread starts to iterate through equivalent voxels (i.e. ones with the same x,y coordinate) along the z direction of the volume, determining the truncated signed distance function values and averaging them with previous values.
This is repeated until the thread has iterated through all the z-planes. This is performed by each thread, each of which is allocated to a different x,y coordinate on the z-plane. This sequence of one plane of the volume at a time has good memory access efficiency characteristics, for the memory layout inFIG. 5, since one z-plane corresponds to a small contiguous region of the linear pitched array. Hence, once this is completed by all threads the whole 3D volume has been analyzed, and a truncated signed distance function calculated for each voxel relative to the depth image414. The process then waits for the next depth image frame from the depth camera to be received, and starts again, adding more values to the 3D volume where possible.
The result of this process is a 3D volume that comprises voxels having an averaged value between −1 and +1 (although note that this average value may be represented by multiple values such as the “weighted sum” and “sum of weights” values above). An averaged value of zero indicates that a surface in the environment is present at that location. Because multiple frames of depth images are added to the volume over time, the model stored in the volume is gradually built up in more and more detail. Repeated measurements of the same region of the environment add more detail and effectively increase the resolution of the information provided by the depth camera. Furthermore, noise is also effectively averaged out from the depth images, leaving a much smoother surface. This enables detail to be seen in the model that cannot be seen from an individual depth image.
The use of separate execution threads in this manner enables computationally efficient processing over the whole 3D volume. For example, GPU processors are arranged to efficiently execute parallel program threads, where each thread is performing the same operations. This enables the model generation process described above with reference toFIG. 13to be performed in real-time, such that the model is constructed at the frame-rate of the depth camera.
Although the present examples are described and illustrated herein as being implemented in a gaming system, the system described is provided as an example and not a limitation. As those skilled in the art will appreciate, the present examples are suitable for application in a variety of different types of interactive computing systems, including augmented reality systems and robotics systems, telepresence and simluations. Other examples include scanning a set for 3D TV or remote display of 3D presentations, generating content for virtual tourism, remote collaboration, scanning a scene for the emergency services and first responders.
The term ‘computer’ is used herein to refer to any device with processing capability such that it can execute instructions. Those skilled in the art will realize that such processing capabilities are incorporated into many different devices and therefore the term ‘computer’ includes PCs, servers, mobile telephones, personal digital assistants and many other devices.
The methods described herein may be performed by software in machine readable form on a tangible storage medium e.g. in the form of a computer program comprising computer program code means adapted to perform all the steps of any of the methods described herein when the program is run on a computer and where the computer program may be embodied on a computer readable medium. Examples of tangible (or non-transitory) storage media include disks, thumb drives, memory etc and do not include propagated signals. The software can be suitable for execution on a parallel processor or a serial processor such that the method steps may be carried out in any suitable order, or simultaneously.
This acknowledges that software can be a valuable, separately tradable commodity. It is intended to encompass software, which runs on or controls “dumb” or standard hardware, to carry out the desired functions. It is also intended to encompass software which “describes” or defines the configuration of hardware, such as HDL (hardware description language) software, as is used for designing silicon chips, or for configuring universal programmable chips, to carry out desired functions.
Those skilled in the art will realize that storage devices utilized to store program instructions can be distributed across a network. For example, a remote computer may store an example of the process described as software. A local or terminal computer may access the remote computer and download a part or all of the software to run the program. Alternatively, the local computer may download pieces of the software as needed, or execute some software instructions at the local terminal and some at the remote computer (or computer network). Those skilled in the art will also realize that by utilizing conventional techniques known to those skilled in the art that all, or a portion of the software instructions may be carried out by a dedicated circuit, such as a DSP, programmable logic array, or the like.
Any range or device value given herein may be extended or altered without losing the effect sought, as will be apparent to the skilled person.
Although the subject matter has been described in language specific to structural features and/or methodological acts, it is to be understood that the subject matter defined in the appended claims is not necessarily limited to the specific features or acts described above. Rather, the specific features and acts described above are disclosed as example forms of implementing the claims.
It will be understood that the benefits and advantages described above may relate to one embodiment or may relate to several embodiments. The embodiments are not limited to those that solve any or all of the stated problems or those that have any or all of the stated benefits and advantages. It will further be understood that reference to ‘an’ item refers to one or more of those items.
The steps of the methods described herein may be carried out in any suitable order, or simultaneously where appropriate. Additionally, individual blocks may be deleted from any of the methods without departing from the spirit and scope of the subject matter described herein. Aspects of any of the examples described above may be combined with aspects of any of the other examples described to form further examples without losing the effect sought.
The term ‘comprising’ is used herein to mean including the method blocks or elements identified, but that such blocks or elements do not comprise an exclusive list and a method or apparatus may contain additional blocks or elements.
It will be understood that the above description of a preferred embodiment is given by way of example only and that various modifications may be made by those skilled in the art. The above specification, examples and data provide a complete description of the structure and use of exemplary embodiments of the invention. Although various embodiments of the invention have been described above with a certain degree of particularity, or with reference to one or more individual embodiments, those skilled in the art could make numerous alterations to the disclosed embodiments without departing from the spirit or scope of this invention.
Claims
- An interactive computing system comprising: an input for receiving a first series of depth images from a mobile depth camera when in motion and a second series of depth images from the mobile depth camera when static;a real-time camera tracking engine for tracking a position of the mobile depth camera when in motion;a dense 3D environment modeling system arranged to generate a dense 3D model of the environment from any of the series of depth images and position data from the real-time camera tracking engine;and an integration engine arranged to integrate at least a part of the dense 3D model into an application and to provide user input to the application by tracking real-time movement in a part of the environment using the second series of depth images, the integration engine being further arranged to: analyze the dense 3D model to identify objects in the model;when an object is identified, input object type information into the application;and adjust operation of the application based on the input object type information, wherein: the object comprises an active object and the integration engine is further arranged to adjust an output of the active object;the object comprises a display and the integration engine is further arranged to automatically calibrate a position of an object relative to the display based on a detected relative position of the display and the mobile depth camera;the integration engine is further arranged to adjust the output of another detected object;or the object comprises another depth camera and the integration engine is further arranged to calibrate the system based on a relative position of each depth camera.
- An interactive computing system according to claim 1 , further comprising: an object recognition module arranged to analyze the dense 3D model of the environment and identify objects within the model.
- An interactive computing system according to claim 2 , wherein the integration engine is further arranged to adapt the application based on an object identified within the dense 3D model.
- An interactive computing system according to claim 3 , wherein adapting the application comprises automatically determining position calibration information for an object based on a detected relative location of a display and the mobile depth camera.
- An interactive computing system according to claim 4 , wherein the object comprises a pointing device or a user of the system.
- An interactive computing system according to claim 1 , further comprising the mobile depth camera.
- An interactive computing system according to claim 6 , further comprising a plurality of additional depth cameras.
- An interactive computing system according to claim 3 , wherein the identified object is a projector and the integration engine is arranged to use the 3D model to influence output of the projector.
- An interactive computing system according to claim 1 , wherein the system is a gaming system and the application is a game.
- A method of operating an interactive computing system comprising: receiving a series of depth images from a mobile depth camera in motion around an environment;generating a dense 3D model of the environment from the series of depth images;integrating at least a part of the dense 3D model into an application, integrating at least the part of the dense 3D model into the application including: analyzing the dense 3D model to identify objects in the model;when an object is identified, inputting object type and object location information into the application;and adjusting operation of the application based on the input object type or location information;receiving a second series of depth images from the mobile depth camera when not in motion;and tracking real-time movement in 3D in a region of the environment using the second series of depth images, and wherein: the object comprises an active object and adjusting performance of the application includes adjusting an output of the active object;the object comprises a display and adjusting performance of the application comprises automatically calibrating a position of an object relative to the display based on a detected relative position of the display and the mobile depth camera;adjusting performance of the application comprises adjusting the output of another detected object;or the object comprises another depth camera and adjusting performance of the application comprises calibrating the system based on a relative position of each depth camera.
- A method according to claim 10 , further comprising: generating the dense 3D model using the second series of depth images.
- A method according to claim 11 , further comprising: updating the dense 3D model using the second series of depth images.
- A method according to claim 10 , wherein integrating at least the part of the dense 3D model into the application comprises: analyzing the dense 3D model to automatically identify objects in the model;and adjusting operation of the application based on the input object type and location information.
- A method according to claim 10 , wherein the object comprises the active object and adjusting performance of the application comprises adjusting the output of the active object.
- A method according to claim 10 , wherein the object comprises the display and adjusting performance of the application comprises automatically calibrating the position of the object relative to the display based on the detected relative position of the display and the mobile depth camera.
- A method according to claim 10 , wherein adjusting performance of the application comprises adjusting the output of the another detected object.
- A method according to claim 10 , wherein the object comprises another depth camera and adjusting performance of the application comprises calibrating the system based on the relative position of each depth camera.
- A method according to claim 10 , further comprising: receiving a series of depth images from each of one or more additional depth cameras;generating a dense 3D model of the environment from each series of depth images;identifying common features in more than one dense 3D model;and computing relative locations of cameras based on the identified common features.
- A method according to claim 10 , wherein the interactive computing system is a gaming system and the application is a game.
- A gaming system having a first and second phase of operation, the gaming system comprising: an input for receiving a first series of depth images from a mobile depth camera in the first phase of operation and a second series of depth images from the mobile depth camera in the second phase of operation, wherein the mobile depth camera is in motion in the first phase of operation and is static in the second phase of operation;a real-time camera tracking engine arranged to track a position of the mobile depth camera in the first phase of operation;a dense 3D modeling system arranged to generate a 3D model of a room using at least the first series of depth images and the position of the mobile depth camera when each depth image was captured;and a gaming engine arranged to integrate at least a part of the dense 3D model into a game and to track real-time movement in a part of the room using the second series of depth images as a user input to the game, the gaming engine being further arranged to: analyze the dense 3D model to identify objects in the model;when an object is identified, input object type information into the game;and adjust operation of the game based on the input object type, and wherein: the object comprises an active object and the gaming engine is further arranged to adjust an output of the active object;the object comprises a display and the integration engine is further arranged to automatically calibrate a position of an object relative to the display based on a detected relative position of the display and the mobile depth camera;the integration engine is further arranged to adjust the output of another detected object;or the object comprises another depth camera and the integration engine is further arranged to calibrate the system based on a relative position of each depth camera.
Disclaimer: Data collected from the USPTO and may be malformed, incomplete, and/or otherwise inaccurate.