U.S. Pat. No. 9,480,910
INTERACTIVE EMBODIED ROBOT VIDEOGAME THROUGH THE USE OF SENSORS AND PHYSICAL OBJECTS
Issue DateMay 9, 2014
Illustrative Figure
Abstract
The present invention refers to an embodied Robot videogame apparatus that receives input through the (human) user's physical actions (full body actions), contact and physiological signals (Bio-signals). The apparatus has principal components: led/sound sensor eye with a video camera; mechanical lever; rotation sensor; rubber torso; solar battery; sensor leds; heart rate and galvanic skin response sensor; multi-touch computer display, with a I/O board v2.0 Bluetooth wireless connection; multiplayer button; microphone; intensity sensor; feet support; suspensions; rubber pneumatic wheels; accelerometer sensor; plastic leveler sensor; wireless Bluetooth digitizers; Velcro strips; and GPS. The apparatus includes a series of electronic sensor that detects the user's input physical actions, contact and physiological signals in real-time. The output result is visualized on a multi-touch computer display. The player's real-time actions are translated in virtual actions in the software game scenarios (e.g., running with the physical robot represents the same virtual action in the game avatar). The apparatus establishes a simultaneous connection between physical and virtual realities and can be shared through online connection.
Description
DETAILED DESCRIPTION OF THE INVENTION We will now make a detailed description of the invention, according with the previous presented figures. The invention comprises the following components: the mechanical lever (1), the led/sound sensor eye (2) and a rotation sensor (10) on the head of the robot. The following components are placed on the rubber torso (4): the solar battery (3), the sensor leds (5), the heartrate and galvanic skin response sensor (11), the multi-touch computer display (13), with the I/O board v2.0 Bluetooth wireless connection (12), the multiplayer button (14), microphone (15) and the intensity sensor (16). The rubber torso (4) is supported by a triangular base which is composed with three mechanical suspensions (7), three rubber pneumatic wheels (9), feet support (8), and the accelerometer sensor (17). Between the rubber torso (4) and the triangular base it's located a plastic leveler sensor (6). The drawings represent an Interactive embodied robot videogame apparatus integrating electronic wireless sensors and physical objects with components. The mechanical lever (1) has to components: a light bulb placed on the left frontal and lateral part of the robot head (simulating an eye and with a physical lever); a dynamo motor generator that converts user's hand physical manipulations (circular movements) into electrical energy to power a 2V light bulb. The mechanical lever (1) has 12×1.5×1 cm and it's connected with the 16×6×6 cm light bulb that supports the lever. The mechanical lever (1) weights 0.2 Kg. The led/sound sensor eye (2) it's placed in the right frontal part of the robot head (simulating an eye). It translates the audio software videogame's output in sound waves: robot's speech (audio language) and other produced sounds (e.g., music). The led/sound sensor eye (2) is connected to the multi-touch computer display (13) through a mini jack plug (0.35 cm) ...
DETAILED DESCRIPTION OF THE INVENTION
We will now make a detailed description of the invention, according with the previous presented figures.
The invention comprises the following components: the mechanical lever (1), the led/sound sensor eye (2) and a rotation sensor (10) on the head of the robot. The following components are placed on the rubber torso (4): the solar battery (3), the sensor leds (5), the heartrate and galvanic skin response sensor (11), the multi-touch computer display (13), with the I/O board v2.0 Bluetooth wireless connection (12), the multiplayer button (14), microphone (15) and the intensity sensor (16).
The rubber torso (4) is supported by a triangular base which is composed with three mechanical suspensions (7), three rubber pneumatic wheels (9), feet support (8), and the accelerometer sensor (17).
Between the rubber torso (4) and the triangular base it's located a plastic leveler sensor (6).
The drawings represent an Interactive embodied robot videogame apparatus integrating electronic wireless sensors and physical objects with components.
The mechanical lever (1) has to components: a light bulb placed on the left frontal and lateral part of the robot head (simulating an eye and with a physical lever); a dynamo motor generator that converts user's hand physical manipulations (circular movements) into electrical energy to power a 2V light bulb. The mechanical lever (1) has 12×1.5×1 cm and it's connected with the 16×6×6 cm light bulb that supports the lever. The mechanical lever (1) weights 0.2 Kg.
The led/sound sensor eye (2) it's placed in the right frontal part of the robot head (simulating an eye). It translates the audio software videogame's output in sound waves: robot's speech (audio language) and other produced sounds (e.g., music). The led/sound sensor eye (2) is connected to the multi-touch computer display (13) through a mini jack plug (0.35 cm) to acquire the videogame software output audio signal. Users can either switch the led/sound sensor eye (2) “On” and “Off” by a button and adjust volume by turning a plastic wheel. This led/sound sensor eye (2) is recharged by the multi-touch computer display (13) via USB 2.0 connection with a 5V supply. The led/sound sensor eye (2) also has a single 1080p HD camera that allows for 720p/1080p video capture with frame rates from 1 hz to 60 Hz. The led/sound sensor eye (2) has 2.5×2.5×2 cm and weights 0.07 Kg.
The rotation sensor (10) it's placed in the superior part of the embodied robot system videogame apparatus (back of the head). It calculates the apparatus position through the triple-axis earth's magnetic field: apparatus acceleration intensity, allowing for identifying the invention apparatus position in three physical dimensions on spatial coordinates (e.g. “up”, “down”, “left”, “right”, “rotations”). This sensor gives digital input to the multi-touch computer display (13) videogame software with a range of ±1 Gauss and heading accuracy of 2.0 deg RMS at 0 deg tilt, 3.0 deg RMS at ±15 deg tilt, 4.0° RMS at ±60 deg tilt. This sensor measures 2.8×2.1×1 cm and weights 0.3 Kg.
The solar battery (3) it's placed in the front left side of the rubber torso (4), and it includes a 16V 210 mA 2 W solar panel that gives 19V power supply to the multi-touch computer display (13)—gives constant charging through its fiberglass solar panels. The solar battery (3) recharges from 35 to 38 hours under strong direct sun light. It has 16×9×1.5 cm and weights′0.42 Kg.
The sensor leds (5) it's placed on the front right side of the embodied robot system videogame apparatus. It produces visible light while pressed and generates digital input to the multi-touch computer display (13), videogame software, according to the user's physical actions. The sensor leds (5) allows to identify the spatial areas where the pressure is made in the sensor leds (5)—identifies the pressure that the user produces (10 KPa-0.10 Kg/cm, 1.5 PSI) to 981 KPa (10.0 Kg/cm, 142 PSI), according to each 5 mm area. It has 150×0.2×0.1 cm and weights 0.02 Kg.
The rubber torso (4) is made of dense rubber and allows for the user to control the embodied robot system videogame apparatus with its body (e.g. “push” and “pull”). The rubber torso (4) sustains the different electronic and mechanical components from the embodied robot system videogame apparatus: the solar battery (3), the sensor leds (5), the rotation sensor (10), the heart rate and galvanic skin response sensor (11), the multi-touch computer display (13), the multiplayer button (14), the microphone (15), and the intensity sensor (16). The rubber torso (4) has 80×50×25 cm, weights 65 Kg (including all its mechanical and electronic components), and it is connected at its bottom with a plastic leveler with sensor (6).
The heart rate and galvanic skin response sensor (11) is placed on the upper sides (left and right sides) of the rubber torso (4) allowing measuring the user's heart rate (heart rate variability) and galvanic skin response (calculates the variations of user's emotional states) in real-time. Each one of these sensors has one rectangular surface sensor pad (20.3×20.3×1.5 and weights 0.4 Kg) that is made of electrical conductive material to measure the skin temperature, heat flux and skin electrical conductivity. Data results from this sensor are visualized in the multi-touch computer display (13) videogame software.
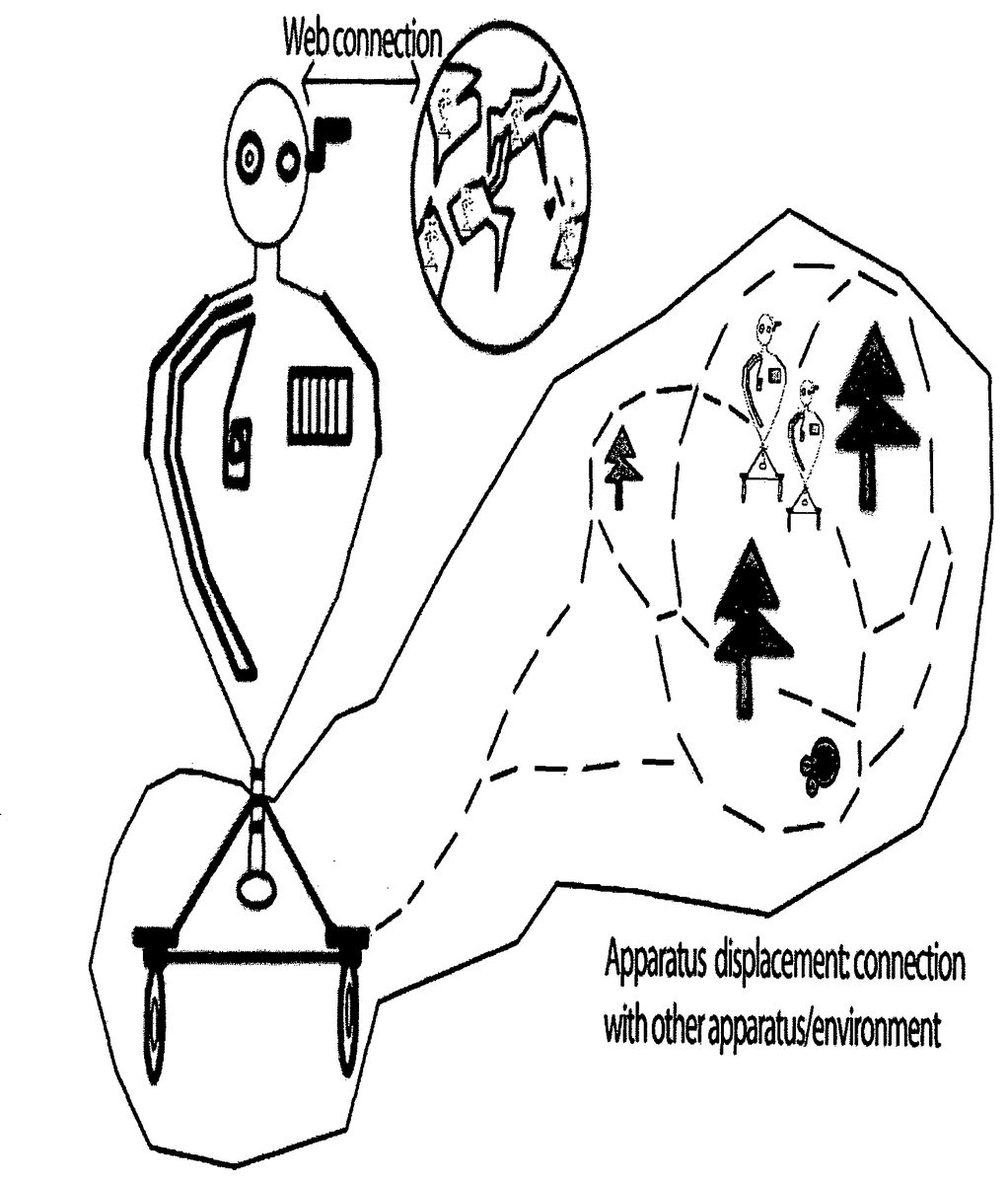
The multiplayer button (14) is placed in the back left part of the rubber torso (4), and when pressed it starts the multiplayer function by activating the GPS function: it allows for the users to start a connection with other players by playing a collective game in the same (GPS connection) or different geographical location (a web server). The multiplayer button (14) measures the applied force by the user in a range of 0.1 cm, or 2.0 N (0.20 Kg) in real-time. It has 3×1.5×0.5 cm and it weighs 0.01 Kg.
The microphone (15) it's placed in the back central part of the rubber torso (4). It's an acoustic-to-electric transducer that converts sound waves into an electrical signal. The microphone (15) captures the produced user's sound waves (“speech”) and converts them to a digital signal to be recognized by the videogame software. Once these specific sound waves are analyzed, the software produces a wave sound output response through the led/sound sensor eye (2) to interact with the user. The microphone (15) connects to the multi-touch computer display (11) via cable TRS connector (input to the soundcard).
The intensity sensor (16) is a slider bar placed in back right part of the rubber torso (4), to measure the user's contact position in a range of 10 cm (linear resistive potentiometer). The user is persuaded to use this sensor (by sliding a rubber button in two directions), to control the videogame software tasks. It has 2.4×1.1×1.1 cm and weights 0.02 Kg.
The plastic leveler with sensor (6) is a plastic cylindrical structure with six protrusions that fit internally with the rubber torso (4). The plastic leveler with sensor (6) allows for the user to set different height levels for the rubber torso (from 80 to 160 cm), with a fitting sensors sprockets modulator system. The user personalizes the rubber torso's (4) height by pulling or pushing it “side-up” or “side-down” with its hands, and by selecting each one of the 5 sprockets levels, integrating5sensors for each level: responding to a pressure from approx. 4 KPa (0.04 Kg/cm, 0.6 ESI) to 981 KPa (10.0 Kg/cm, 142 PSI) or a force of approx. 0.6 N (0.60 Kg) to 98 N (10 Kg) that's evenly applied across its active area, in a 13 mm diameter disk. The plastic leveler with sensor (6) activates a wireless communication between its single wireless Bluetooth digitizer and the I/O board v2.0 Bluetooth wireless connection (12) placed in the multi-touch computer display (13). The digital and mechanical input (five sensors and five sprockets modulator system) is translated in the videogame software scenarios. The plastic leveler sensor (6) has 50×23×18 cm and weights 2 Kg.
The plastic leveler sensor (6) it's connected to a triangular base made with steel that it's wrapped with dense rubber. It sustains the robot torso, has 41 cm on each side, and weights 2.1 Kg. The triangular base integrates a three sponge feet support (8) for the user to place its feet, hands, etc., (allowing for the user to manipulate the apparatus in various ways), and supporting the users weight up to 120 KG.
The three sponge feet supports (8) have 15×13×3 cm and weight 0.3 Kg. The three sponge feet supports (8) are screwed to the suspensions (7) through a steel base. One rubber suspension for each of the three sponge feet supports (8). Each of the suspensions (7) has a diameter of 10 cm and supports the three rubber pneumatic wheels (9) (connected with a steel screwed bilateral system to the wheels circumference center). The three rubber pneumatic wheels (9) enable the apparatus displacement in different contextual and physical terrains. Each of the three rubber pneumatic wheels (9) has a 20 cm diameter and weights 1.5 Kg.
The accelerometer sensor (17) it's placed in one of the rubber pneumatic wheels in the embodied robot system videogame apparatus, triangular base (9). The accelerometer sensor (17) measures the dynamic acceleration (or deceleration) and inclination (tilt, i.e. acceleration due to gravitation) in three dimensions simultaneously (X, Y, Z). At the same time it calculates the triple-axis earth's magnetic field (intensity and acceleration), allowing for the identification of the apparatus displacement characteristics in real-time. Data results are visualized and controlled in the videogame software in the multi-touch computer display (13), for e.g., activating the avatar displacement in the videogame software in real-time by “pushing” and “pulling” the embodied robot system videogame apparatus. It has 5.3×3.3×1.1 cm and it weighs_0.02 Kg.
A Bluetooth wireless connection with the I/O board v2.0 (12) integrated in the multi-touch computer display (13) is established with the apparatus sensors connected with wireless Bluetooth digitizers (18). A single Bluetooth digitizer connects to each wireless electronic sensor: the rotation sensor (10), the sensor leds (5), the plastic leveler with sensor (6), the heart rate and galvanic skin response sensor (11), the multiplayer button (14), the intensity sensor (16) and the accelerometer sensor (17). All of these wireless sensors are detachable what gives the users the possibility of transforming the embodied robot system videogame apparatus appearance and interaction options. The assembly of the invention apparatus is modular, making the system personalized to each user. These sensors can be connected to the rubber torso (4), and to external environment to the apparatus, via Velcro strips.
The wireless Bluetooth digitizers (18) have a micro plastic box format. They perform a signal acquisition to a maximum of 100 meters distance and transmit digital messages to the multi-touch computer display (13) in real-time. Each one of the wireless Bluetooth digitizers (18) its coupled/attached to the sensors via an internal connection with a 3-pin column input cable extremity (2.54 mm/0.1″ spaced), which is then connected to an IC port placed inside the wireless Bluetooth digitizers (18). The wireless Bluetooth digitizers (18) are empowered by a 9V battery (each one has 5×2.7×1.4 cm and weights 0.03 Kg).
The multi-touch computer display (13) is placed on the back central part of the embodied robot system videogame apparatus. The multi-touch computer display (13) is prepared for anti-shock and anti-vibration with a MIL810F system (shock Mounted Hard Drive). It has a sunlight readable display and it is prepared for dust, waterproof and high and low temperatures resistance (40° C. to −50° C.). It has a 7″ widescreen 1024×600 resolution/TFT LCD. Its dimensions are 17×14×5 cm, with a weight of 1.1 Kg, with an ultra low power atom 2530 1.6 GHz processor (w/US15 W Chipset), 2 GB DDR2 RAM, a data Storage/Disk of 64 GB SSD solid state hard drive, and GPS included. The multi-touch computer display (13) includes the I/O board v2.0 (12) that establishes the v2.0 Bluetooth connection with the sensors (Bluetooth digitizers) wirelessly, with a 10 bits resolution (1024 steps of each 4.9 mV) that can sample at up to 5760 Hz milliseconds latency in real-time.
The apparatus invention is prepared for harsh environments—dust and waterproof and high/low temperatures resistance (40° C. to −50° C.).
Claims
- A robot apparatus comprising: a rubber torso;a triangular base adapted to support the rubber torso, the triangular base being made of steel, the triangular base further comprising three sponge feet supports connected to three suspensions, wherein the three suspensions are connected to three rubber pneumatic wheels that enable displacement of the robot apparatus in various physical terrains;a head disposed on the rubber torso;a multi-touch computer display disposed on a back side of the rubber torso;video game software displayed on the multi-touch computer display;a plurality of sensors connected to the rubber torso via a plurality of Velcro strips, the plurality of sensors including: a sensor leds disposed on a frontal right side of the rubber torso and adapted to produce visible light and generate input to the video game software in real-time when pressed by a user;a rotation sensor disposed on a back of the head, the rotation sensor adapted to calculate intensity and acceleration displacement of the robot apparatus based on a triple-axis magnetic field of the earth by identifying a position of the robot apparatus in physical space in real-time, wherein position information is represented in visual form by the videogame software operating on the multi-touch computer display;a heart rate and galvanic skin response sensor disposed on upper left and right sides of the rubber torso, the heart rate and galvanic skin response sensor adapted to measure a heart rate and galvanic skin response of a user in real-time, wherein measurements generated by the heart rate and galvanic skin response sensor are represented in visual form by the video game software on the multi-touch computer display;a multiplayer button disposed a back left side of the rubber torso, wherein the multiplayer button, when pressed by a user, activates a multiplayer function in the videogame software displayed on the multi-touch computer display;a microphone disposed on a back central part of the rubber torso, the microphone adapted to convert, in real time, speech and sound waves into digital signals recognized by the video game software in the multi-touch computer display;and an intensity sensor comprising a slider bar with a button disposed in a back right part of the rubber torso, the intensity sensor adapted to control, in real time, tasks associated with the videogame software displayed on the multi-touch computer display, in response to pressure applied by a user;the robot apparatus further comprising: a plastic leveler sensor comprising a cylindrical structure with six protrusions that fit internally inside the rubber torso allowing a user to select one of a plurality of height levels for the rubber torso;an accelerometer sensor disposed in a selected one of the three rubber pneumatic wheels, the accelerometer sensor being adapted to generate a measurement, in real time, of one of a dynamic acceleration, a deceleration and an inclination of the robot apparatus in a physical terrain, wherein the measurement is translated into digital input to the video game software and is represented in visual form on the multi-touch computer display;a plurality of wireless Bluetooth digitizers;a solar battery that includes a solar panel disposed on a left part of the rubber torso, the solar battery being adapted to provide power to the multi-touch computer display via solar power;a mechanical lever disposed on a left frontal and lateral part of the head, the mechanical lever adapted to convert physical movements of a user into electric energy to power a 2V light bulb;and a led/sound sensor eye disposed in a right frontal part of the head, the led/sound sensor adapted to translate audio output received from the videogame software operating in the multi-touch computer display into sound waves, speech and music, wherein the led/sound sensor eye includes a video camera adapted to capture images of activities performed by a user;wherein the multi-touch computer display includes an I/O board v2.0 Bluetooth wireless connection adapted to communicate with the sensor leds, the rotation sensor, the heart rate and galvanic skin response sensor, the multiplayer button, the intensity sensor, the plastic leveler sensor, and the accelerometer sensor via the plurality of wireless Bluetooth digitizers;wherein users can play the videogame in a same geographical location via GPS or in a different spatial location via a webserver;and wherein the computer display is connected to the triangular base made of steel.
- The robot apparatus according to claim 1 , wherein the mechanical lever comprises a light bulb, a dynamo motor generator and a lever.
- The robot apparatus according to claim 1 , wherein the led/sound sensor eye comprises a video camera and a mechanism adapted to translate an output of a videogame software into sound waves, and is connected to the multi-touch computer display via a cable to acquire the output signal from the videogame software.
- The robot apparatus according to claim 3 , wherein the led/sound sensor eye is rechargeable through the multi-touch computer display via a USB connection.
- The robot apparatus according to claim 1 , wherein the rotation sensor is connected to a respective one of the plurality of wireless Bluetooth digitizers, wherein the rotation sensor calculates an apparatus intensity and an acceleration displacement through a triple-axis magnetic field of an earth and identifies an apparatus position in physical spatial coordinates in real-time.
- The robot apparatus according to claim 1 , wherein the solar battery is adapted to obtain energy from sunlight and recharge the multi-touch computer display.
- The robot apparatus according to claim 1 , the sensor leds includes a respective one of the plurality of wireless Bluetooth digitizers, wherein the sensor leds produces a visible light while pressed.
- The robot apparatus according to claim 1 , wherein the rubber torso includes the solar battery, the sensor leds, the rotation sensor, the heart rate and galvanic skin response sensor, the multi-touch computer display, the multiplayer button, the microphone, and the intensity sensor;wherein the solar battery, the sensor leds, the rotation sensor, the heart rate and galvanic skin response sensor, the multi-touch computer display, the multiplayer button, the microphone, and the intensity sensor are connected to the rubber torso by the plurality of Velcro strips.
- The robot apparatus according to claim 1 , wherein the rubber torso that is connected to a triangular base via the plastic leveler sensor.
- The robot apparatus according to claim 1 , wherein the heart rate and galvanic skin response sensor includes a respective one of the plurality of wireless Bluetooth digitizers and a rectangular pad made of an electrical conductive material, wherein the heart rate and galvanic skin response sensor measures skin temperature, heat flux and skin electrical conductivity, by measuring a heart rate of a user and a galvanic skin response of the user in real-time.
- The robot apparatus according to claim 1 , wherein the multiplayer button includes a respective one of the plurality of wireless Bluetooth digitizers, wherein the multiplayer button is disposed in the rubber torso, wherein the multiplayer button starts a multiplayer function by activating an online connection when pressed.
- The robot apparatus according to claim 1 , the microphone is disposed in the rubber torso, wherein the microphone includes an acoustic-to-electric transducer that converts sound waves into an electrical signal.
- The robot apparatus according to claim 1 , wherein the microphone is connected to the multi-touch computer display via a cable TRS connector input to a soundcard.
- The robot apparatus according to claim 1 , wherein the intensity sensor further includes a respective one of the plurality of wireless Bluetooth digitizers.
- The robot apparatus according to claim 1 , wherein the plastic leveler sensor includes a respective one of the plurality of wireless Bluetooth digitizers and a plastic cylindrical structure that has six protrusions that fit internally with the rubber torso.
- The robot apparatus according to claim 1 , wherein the plastic leveler sensor is activated by an action of pulling or pushing to select five sprockets levels, wherein each level integrates five sensors wherein the plastic leveler sensor responds to one of a pressure between approximately 0.6 PSI and 142 PSI and a force between approximately 0.6 N and 98 N.
- The robot apparatus according to claim 1 , wherein the plastic leveler sensor is connected to a triangular base that supports the rubber torso, wherein the rubber torso is made of steel and wrapped with a dense rubber.
- The robot apparatus according to claim 17 , wherein the triangular base with three feet supports support users having a weight up to 120 kg.
- The robot apparatus according to claim 1 , wherein the three feet supports are screwed to the rubber suspension via a steel base.
- The robot apparatus according to claim 1 , wherein each suspension supports a respective one of the three rubber pneumatic wheels, the suspension being connected with a steel screwed bilateral system to a center of the respective rubber pneumatic wheel.
- The robot apparatus according to claim 1 , wherein the accelerometer sensor includes a respective one of the wireless Bluetooth digitizers, wherein the accelerometer sensor is disposed in one of the three rubber pneumatic wheels, wherein the three rubber pneumatic wheels are the triangular base.
- The robot apparatus according to claim 1 , wherein the wireless Bluetooth digitizers comprise a micro plastic box and are adapted to acquire a signal from a distance of 100 meters and to transmit digital messages to the multi-touch computer display in real-time.
- The robot apparatus according to claim 1 , wherein the plurality of wireless Bluetooth digitizers are coupled to one or more wireless electronic sensors via an internal connection with a 3-pin column input cable extremity, the internal connection being connected to an I2C port placed inside the plurality of wireless Bluetooth digitizers.
- The robot apparatus according to claim 1 , wherein the wireless Bluetooth digitizer are recharged by a 9V battery.
- The robot apparatus according to claim 1 , wherein the multi-touch computer display includes an anti-shock and anti-vibration system, GPS capability, and a I/O board v2.0 Bluetooth wireless connection.
- The robot apparatus according to claim 1 , wherein the I/O board v2.0 Bluetooth wireless connection establishes a connection with one or more sensors wirelessly, with a 10 bits resolution, 1020 steps of each 4.9 mV, that can sample up to 5760 Hz milliseconds latency in real-time.
- The robot apparatus of claim 1 , wherein the robot apparatus is operated by a method comprising: obtaining data relating to physical actions, physiological signals and speech via the rotation sensor, sensor leds, plastic leveler sensor, heart rate and galvanic skin response sensor, multiplayer button, intensity sensor and accelerometer sensor;transmitting the data to the I/O board v2.0 Bluetooth wireless connection located in the multi-touch computer display;receiving the data, by the I/O board v2.0 Bluetooth wireless connection;translating, by the I/O board v2.0 Bluetooth wireless connection, the data into digitally computer-encoded messages;transmitting the digitally computer-encoded messages to the multi-touch computer display;providing the computer-encoded messages representing data obtained by the rotation sensor, sensor leds, plastic leveler sensor, heart rate and galvanic skin response sensor, multiplayer button, intensity sensor and accelerometer sensor as input to the videogame;translating the digitally computer-encoded messages in-real time into a digital output including sounds and images;providing the sounds and images via the multi-touch computer display in connection with the videogame;recording results of the videogame in real time, by the video camera;and sharing the videogame in real-time via an online connection.
- The robot apparatus of claim 1 , wherein a wireless communication is activated between the respective one of the plurality of wireless Bluetooth digitizers that is connected to the plastic leveler sensor and the I/O board v2.0 Bluetooth wireless connection integrated in the multi-touch computer display.
Disclaimer: Data collected from the USPTO and may be malformed, incomplete, and/or otherwise inaccurate.