U.S. Pat. No. 7,967,728
WIRELESS GAME CONTROLLER FOR STRENGTH TRAINING AND PHYSIOTHERAPY
Issue DateNovember 13, 2009
Illustrative Figure
Abstract
Wireless game controller can provide variable resistance during strength training exercise and is coupled with off the shelf video gaming system such as Nintendo WII or personal computer by bluetooth or WiFI connection. The resistance is provided by a motor/generator. Electrical recuperation occurs between eccentric and concentric steps of the exercise, electrical energy is stored in a super capacitor between the steps. Video gaming system is configurable to run exercise software that provide reinforcing game experience, coaching, and physical therapy to the user. Exercise software tracks user's pose using fiduciary marks on the controller and data from 3d accelerometer embedded in the controller. The resistance is computed as a function of one or more the following: exercise type, position, velocity, user profile, and repetition number.
Description
DETAILED DESCRIPTION OF THE INVENTION FIG. 1depicts the muscle training machine103coupled with Nintendo WII102video gaming system. Nintendo WII102is connected to a TV101. The muscle training machine103is a wireless game controller, further described onFIG. 4. FIG. 2depicts the muscle training machine206coupled with a desktop home computer202. Computer runs an exercise game, that can established link with the training machine206through bluetooth adapter203. Exercise game takes extra input from keyboard204and mouse201and provide audio communication to the user through speakers208and video communication through monitor205. Further, exercise software incorporates the pose tracking subsystem based on open source ARToolKitPlus. The pose tracking subsystem relies on web camera207for the video input. FIG. 3depicts the muscle training machine that is loosely coupled with VGS. The machine is embodied as a box301with touchscreen302, hoist with motor305and electronic control module303. Electronic control module303is similar in design to the module depicted inFIG. 7, but the microcontroller702is replaced with a more powerful Atmel AT91SAM9RL64. On the alternative, a more powerful ARM11based microcontroller (such as STMicro STA2065 application processor) is added and communicates with the microcontroller702using I2C bus. Further, the bluetooth module701is replaced with WIFI module. Other changes apparent to one ordinary skilled in the art might be needed. The box301and the blocks306are secured to the wall, were blocks306are secured at different height. The hoist cable312is routed though one of the blocks306and is terminated by one of the interchangeable handles307. Electronic control module303establish WiFi connection to wireless router309, that using the Internet308provide TCP/IP connection to the Internet server304. The microcontroller in ECM runs Windows CE operating system, and using Microsoft Silverlight based user interface, allows to select individual exercises and workouts, adjust the resistance, and track the progress. Using Web Services framework, the software communicates with the Internet server304, which used to store user profiles and distribute data on workouts and exercises. Local ...
DETAILED DESCRIPTION OF THE INVENTION
FIG. 1depicts the muscle training machine103coupled with Nintendo WII102video gaming system. Nintendo WII102is connected to a TV101. The muscle training machine103is a wireless game controller, further described onFIG. 4.
FIG. 2depicts the muscle training machine206coupled with a desktop home computer202. Computer runs an exercise game, that can established link with the training machine206through bluetooth adapter203. Exercise game takes extra input from keyboard204and mouse201and provide audio communication to the user through speakers208and video communication through monitor205. Further, exercise software incorporates the pose tracking subsystem based on open source ARToolKitPlus. The pose tracking subsystem relies on web camera207for the video input.
FIG. 3depicts the muscle training machine that is loosely coupled with VGS. The machine is embodied as a box301with touchscreen302, hoist with motor305and electronic control module303. Electronic control module303is similar in design to the module depicted inFIG. 7, but the microcontroller702is replaced with a more powerful Atmel AT91SAM9RL64. On the alternative, a more powerful ARM11based microcontroller (such as STMicro STA2065 application processor) is added and communicates with the microcontroller702using I2C bus. Further, the bluetooth module701is replaced with WIFI module. Other changes apparent to one ordinary skilled in the art might be needed. The box301and the blocks306are secured to the wall, were blocks306are secured at different height. The hoist cable312is routed though one of the blocks306and is terminated by one of the interchangeable handles307. Electronic control module303establish WiFi connection to wireless router309, that using the Internet308provide TCP/IP connection to the Internet server304. The microcontroller in ECM runs Windows CE operating system, and using Microsoft Silverlight based user interface, allows to select individual exercises and workouts, adjust the resistance, and track the progress. Using Web Services framework, the software communicates with the Internet server304, which used to store user profiles and distribute data on workouts and exercises. Local computer311might run exercise software. The exercise software and electronic control module303mutually will try to discover each other using broadcasting on the local network. If TCP/IP communication is established, the exercise software provides exercise coaching and video games enriching the user experience. Optional Wifi camera310provides video stream for the pose tracking, which is implemented on either electronic control module303or desktop computer311.
FIG. 4depicts the embodiment of the invention as a wireless game controller appearing as a power cable. Handles401and405are connected by cable406. Cable is attached to the host powered by the motor402connected with electronic control module403. To facilitate pose tracking, handles have several pictures of fiduciary marks404.
FIG. 5depicts an elastic band501with fiduciary marks502that can be worn on wrists or ankles during exercise to facilitate pose tracking.
FIG. 6depicts weight training gloves with images of fiduciary marks601,602,603. Fiduciary marks are located to ensure visibility of at least one of the mark regardless of fingers' and arms' position.
FIG. 7depicts the Electronic Control Module (ECM) electric schematics. electric elements specified on the schematic are:D1701—LinkMatik 2.0 Bluetooth transceiverD2702—Microchip micro controller PIC 16C745D3725—National Semiconductor operational amplifier LMC64D4716—Texas Instruments boost regulator TPS 61080D5726—Analog Devices Tri-Axis Inertial Sensor ADIS16350M1703—Micro Drives optical Encoder E4P—300 seriesM2704—Micro Drives DC gear motor M22P seriesC1717—Maxwell ultra capacitor BCA PO350S1724—Hand grip sensor contactsS2. . . S8705. . .708—National Semiconductor Power MOSFET IRL520IS5727—Omron round switch A-22-1.
Serial to Bluetooth data link module D1701provides connection of the Electronic Control Module (ECM) to a standard bluetooth enabled host (playstation, laptop/desktop computer, PDA, mobile phone. ECM is controlled by firmware of the micro controller D2702. Communication portion of the irmware supports the communication link between ECM and a host. Serial data input RTS and serial data output TXD of module D1701and microcontroller D2702are used to serially connect them.
The firmware continuously monitors the output pulses of the incremental optical servo drive shaft encoder M1703.
Gear motor M2704works as the ECM servodrive. Gear motor M2704provides a driving torque or provides a resistive torque In active or passive dynamic mode functioning as a controlled brake to maintain the necessary exercise cord tension level. Switches S5705, S6706, S7707, S8708are controlling the polarity of pulse width modulated signal (PWM) supplied to the motor704. Pulse Width Modulation (PWM) control signals SC1709, SC2710, SC3711are supplied through the power MOSFETs S2712, S3713, S4714to the gear motor M2704. S2712switch provides PWM of VDD2amplitude to the gear motor704. VDD is supplied from the main energy source: rechargeable battery V1715through the DC-DC converter D4716or from the alternative energy source: ultra capacitor C1717. The ultra capacitor C1717charging/re-charging is controlled by the switch S4714. Charging current is limited by the resistor R3718. The ultra capacitor C1717provides a high current boosting energy source for the servo drive. In case of rechargeable battery715and capacitor717been fully charged, the S3713switch provides connection of the motor704to the damping resistor R2719. VDD1720level of the battery voltage is monitored by the microcontroller D2702. AN1voltage signal721monitored by the microcontroller702represents the gear servo motor704current. AN3722signal monitored by microcontroller702represents the charge voltage of the ultra-capacitor C1717. Signal AN2723monitored by microcontroller702represents the dumping resistor current for the Motor M2704which could be used for dynamic breaking when negative passive motor torque is used to maintain the level of resistance during the resistance training exercise.
Hand grip sensor S1724provides electrical pulses detected from user's hand which allows to calculate current heart beat rate of the user. Pulses are getting amplified by operational amplifier D3725and are getting monitored by the microcontroller D2702. Information about the current user's heart beat rate gets sent to the host computer or video game consul through wireless interface of the module701. Information about current acceleration of the ECM is provided by the 3D accelerometer D5726. Video game can show user in real time the better way to perform exercise and at the same time to adjust the resistance level of exercise to maintain the heart beat in the safe range.
FIG. 8depicts wireless game controller for strength training where resistance is provided by dynamic force. The controller comprises 2 handles with embedded heart rate sensors801. Handles are connected using plurality of springs807. User can adjust the resistance by changing number springs. In one of the handle, electronic circuit is placed inside the body802. The circuit contains motor803attached to a hoist, electronic control module804, and battery805. The electronic control module (ECM)804is designed similar to the electronic control modules depicted onFIG. 7, however, the capacity of capacitor717is substantially reduced as there is no need to provide substantial resistance. Motor is used just to trace the distance between the handles. There are sensors808located in the spots springs807attached to the body802. Those sensors are connected to ECM to enable counting of number of springs used during the exercise. ECM is configured to periodically transmit to VGS information about exercise: number of reps performed, energy used, current distance between handles, the pulse, position and velocity from the accelerometer.
FIG. 9depicts exemplary dependence of force902from position901during one rep of the exercise. During concentric step of the exercise motor is configured to use force903. Motor generates energy that is stored in the capacitor717. During eccentric step, motor recuperates energy and is configured to use force904. Overall energy needed during the eccentric step is smaller then the energy generated during concentric step, which allow for the non-100% recuperation. This is needed in case of wireless embodiment. In the case when the resistance mechanism have access to an AC power supply, the force during eccentric step could be higher then during concentric step.
Resistance can be provided by various means known in the art depicted onFIGS. 10-12.FIG. 10depicts a weight training machine where resistance is provided by an electrical motor/generator.1001is frame,1002is cable,1003is a gear box and1004is an electric motor.FIG. 11depicts a weight training machine where resistance is provided by a hydraulic mechanism.1101is handle,1102is hydraulic cylinder.FIG. 11depicts a weight training machine where resistance is provided by an electrical linear actuator.1202is a commercially available actuator,1201is an adjustable handle. Those machines can be coupled with VGS by an electrical circuit similar to one depicted onFIG. 7. On the alternatives, frames can be removed, and the variable resistance mechanism can be put into a more gadget like game controller.
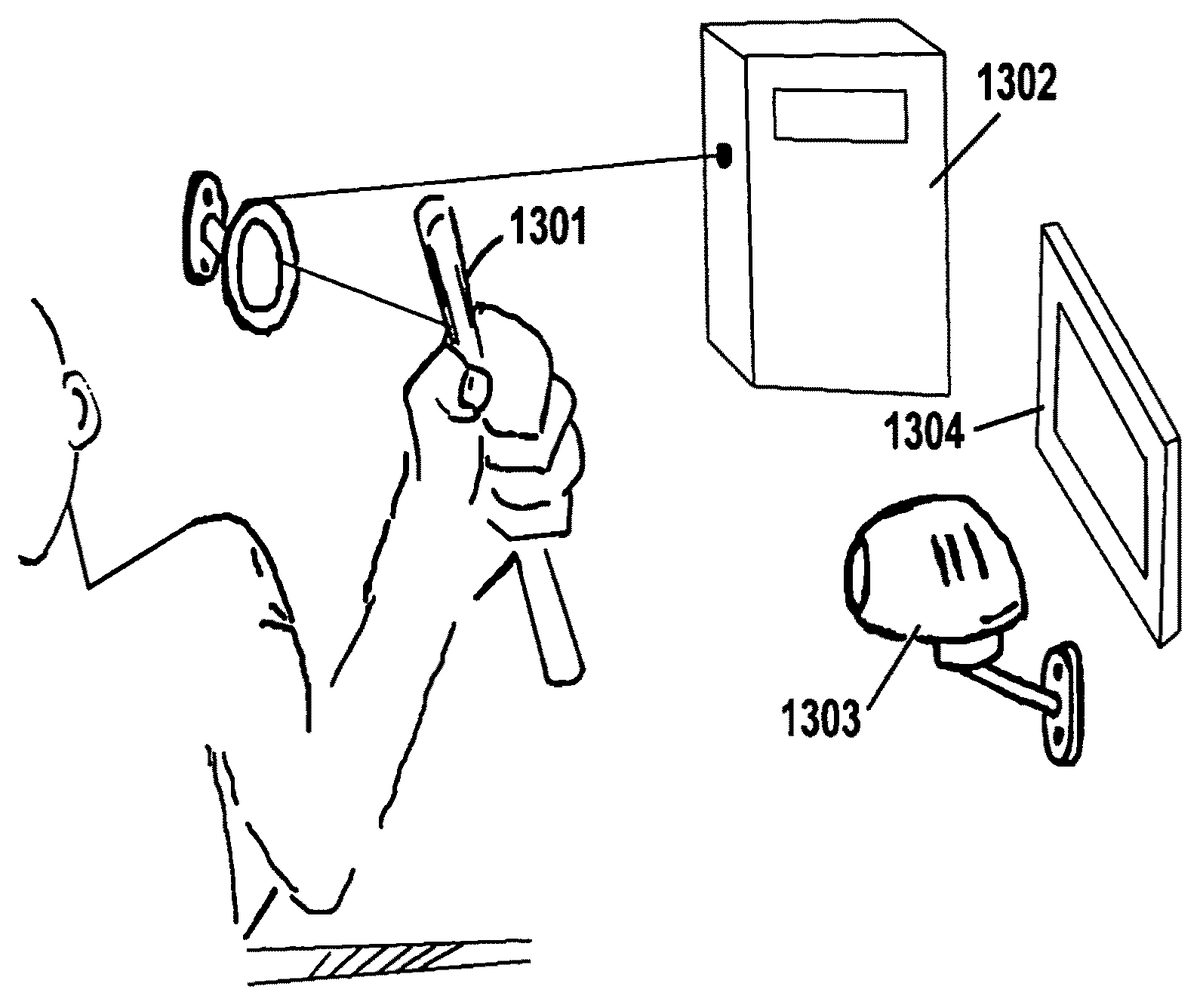
The invention enables various physical exercise based activities, as can be illustrated by the example of remote or virtual online arm wrestling competition depicted onFIG. 13. The arm wrestling competition requires two participants. Each participant places one arm, both put either the right or left, on a surface, with their elbows bent and touching the surface, and they grip handle1301connected by the cable to the exercise box1302connected through VGS and internet to the same kind of VGS and exercise box at other participant's location. The goal is to pin the other's arm onto the surface, with the winner's arm over the loser's arm. Each participant's position is observed by the web-cam1303and gets displayed on the TV monitor1304. One can approximate the force a person is being able to apply during arm wrestling as a function of position, velocity, and time since the start of exercise. The arm wrestling exercise software on personal computer will provide several virtual opponents, each of them can be characterized by such a force function. During the virtual arm-wrestling, the user will select a partner and difficulty level. The software on VGS will receive from the controller current position and velocity, and using profile force curve and some random factor, calculate desired force and send it to the controller. The user technique (force, speed of the movement, posture, endurance, etc) is analyzed by the software and virtual coaching can be provided to improve user technique. The user force curve can be approximated from his exercise and such can become a part of user's online profile. This enables off-line virtual tournament, when software downloads another user's profile and use it as a virtual partner. In online tournament mode, two VGS exchange through internet current position, velocity, and force. The software is configured to adjust force simultaneously on 2 exercise boxes to synchronize position and velocity. Webcam is used to provide video link between 2 exercise partners.
It is beneficial to provide pose tracking into video game, physical exercise, or physiotherapy. Pose tracking is feasible with off the shelf methods and a higher resolution (2 mp or better) web camera. In the embodiment, fiduciary marks are imprinted on the handles of the controller to facilitate pose tracking. Further, user can wear ankle or wrist bands, or gloves with marks. VGS recognizes the position of fiduciary marks using an open source ARToolKitPlus. Controller integrates data from the accelerometers and periodically transfers the integrated position and velocity to VGS The data are used to enhance the tracking precision. The software utilizes OpenCV motion tracking algorithms to combine the data from un-marked motion tracking, tracking of fiduciary marks, position data from the motor, and accelerometer data into single motion model. Intel integrated performance primitives library is used to facilitate image processing.
The system may be used to enable automated exercise program developed by a physiotherapist. Physiotherapist sets exercise parameters and observe initial session through web cam over Internet. During recovery after a dislocation, it is important to allow joint movement up to certain angle, and provide different resistance during eccentric and concentric phases. The software in VGS is configured to supervise users exercises and provide the controlled level resistance to the patient's hand movement at each stage of the exercise. During exercise, the software displays screen schematically shown onFIG. 14. The software displays computer generated model1401of the patient hand with posture adopted from the pose tracking modules. The software displays current velocity1402and visual guidance (faster/slower/good)1403to the user. The software also displays therapeutic limit1405for the user and provide audio/visual warning1406in the case the limit is approached. The user progress is stored as a part of online profile. Resistance is provided by the exercise box described onFIG. 3. Physiotherapist periodically performs review of patient's online profile and modifies parameters.
Claims
- Strength training machine, comprising at least one moving part that a user moves during an exercise, the said machine can provide force at the said moving part, characterized by: the said machine is operatively coupled with a VGS;the said force can be adjusted, so there is a first magnitude of the said force corresponding to a position of the said moving part, and after the adjustment there is a second magnitude of the said force corresponding to the same position of the said moving part, the first magnitude differs from the second magnitude.
- Strength training machine as recited in claim 1 , wherein the said force is variable, so the graph of the magnitude of the said force during a one movement of the said moving part is non-linear, wherein the graph depicts the said magnitude as a function of the position of the said moving part.
- Strength training machine as recited in claim 2 , wherein the said graphs of the magnitude of the force differs between eccentric and concentric motions.
- Strength training machine as recited by claim 1 , wherein the said force is provided by an electrical hoist.
- Strength training machine as recited by claim 1 , wherein the magnitude of the said force can be adjusted by the said VGS.
- Strength training machine as recited by claim 2 , wherein the said force depends on at least one of the following: a. position of the said moving part, b. velocity of the said moving part, c. repetition number in the said exercise.
- Strength training machine as recited by claim 1 , wherein the said machine is coupled with the VGS over a digital wireless connection.
- Strength training machine as recited by claim 1 , wherein the said machine transfers information about position of the said moving part to the said VGS.
- Strength training machine, operatively coupled with VGS over a digital wireless connection, the said machine comprises a moving part that a user moves during an exercise, the said machine can provide force at the said moving part, the said force can be adjusted, so there is a first magnitude of the said fore corresponding to a position of the said moving part, and after the adjustment, there is a second magnitude of the said force corresponding to the same position of the said moving part, the first magnitude differs from the second magnitude, wherein at least one operational characteristic of the machine is either controlled by VGS or transmitted to VGS.
- Strength training machine as recited by claim 9 wherein the said operational characteristic is the magnitude of the said force.
- Strength training machine as recited by claim 9 , wherein the said moving part is a handle, further comprising of a second handle, the said two handles are connected by a connection, during the exercise, the user applies a force to at least one handle aiming at increase of the length of the said connection, the said force provided by the machine counteracts the said increase in the length.
- A game controller, comprising of at least one moving part, a user moves the said moving part during exercise, a cord coupled with the said moving part, a hoist, the said cord is wound on the said hoist, an electrical motor coupled to the said hoist to provide force in the said moving part by creating a rotation moment in the said hoist, a micro controller operatively coupled with the said motor, means to couple the said machine with a VGS, and operable to allow user to perform a first motion of the said moving part, unwinding the said cord from the said hoist and the said force is resisting the said first motion;a second motion of the said moving part, winding the said cord on the said hoist and the said force is helping the said second motion.
- Game controller as recited in claim 12 , wherein the said VGS is aware of the position of the said moving part.
- Game controller as recited in claim 12 , wherein the magnitude of the said force varies with the position of the said moving part, so the graph plotting the said magnitude as a function of the said position is non-linear.
- Game controller as recited in claim 12 , wherein the said VGS is ware of the magnitude of the said force.
- Game controller as recited in claim 15 , wherein the said VGS can control the said magnitude.
- Game controller as recited in claim 12 , wherein the said VGS runs software that coaches user on strength training exercises performed using the said roving part.
- Game controller as recited in claim 12 , wherein the said motor uses electrical energy during the second motion.
- Game controller as recited in claim 18 , wherein the said motor generates electrical energy during the first motion.
- Game controller as recited in claim 19 , wherein at least a portion of electrical energy is recuperated.
Disclaimer: Data collected from the USPTO and may be malformed, incomplete, and/or otherwise inaccurate.