U.S. Pat. No. 10,449,451
VIDEO GAME WITH STEERING ASSIST THAT CONSIDERS PROXIMITY TO A COURSE EDGE
AssigneeNintendo Co., Ltd.
Issue DateAugust 30, 2017
Illustrative Figure
Abstract
In an example game processing of moving a predetermined object in a predetermined course in a virtual space on the basis of an operation performed by a player, first, an input amount according to an input for controlling a moving direction of the predetermined object based on the operation performed by the player is obtained. Next, the input amount according to the input for controlling the moving direction is corrected so as to cause the moving direction of the predetermined object to be close to a direction along a travelling direction as a direction toward a destination, by increasing/decreasing a predetermined correction value which is added to the input amount, on the basis of relationship between a current moving direction of the predetermined object and the travelling direction of the course. Then, movement of the predetermined object is controlled on the basis of the corrected input amount.
Description
DETAILED DESCRIPTION OF NON-LIMITING EXAMPLE EMBODIMENTS In the following, the present embodiment is described. FIG. 1is a functional block diagram of a game system according to the present embodiment. InFIG. 1, a game system1includes: a household television receiver (hereinafter, referred to as “monitor”)2which is one example of display means; a stationary game apparatus body3connected to the monitor2through a connection cord not shown; and a controller6wirelessly connectable to the game apparatus body3. The monitor2displays a game image outputted from the game apparatus body3. The game apparatus body3performs game processing and the like on the basis of a game program and the like stored in a predetermined storage medium (for example, memory card, optical disk, hard disk, or the like) that is readable by the game apparatus body3. In the present embodiment, the game apparatus body3includes a processor section11, a main memory12, a system LSI13, a wireless communication section14, an AV-IC (audio video-integrated circuit)15, and the like. The processor section11executes a predetermined information processing program by use of the main memory12, the system LSI13, and the like. Accordingly, various functions (game processing, for example) in the game apparatus body3are realized. The system LSI13includes a GPU (graphics processor unit)16, a DSP (digital signal processor)17, an input/output processor18, and the like. The GPU16generates an image in accordance with a graphics command (image creation command) from the processor section11. The DSP17functions as an audio processor, and generates audio data by use of sound data and sound waveform (tone) data stored in the main memory12. The input/output processor18performs, for example, transmission/reception of data to/from the controller6through the wireless communication section14. Specifically; the input/output processor18receives, through the wireless communication section14, operation data and the like transmitted from the controller6, and (temporarily) stores the received operation data and the like in a buffer region of the main memory12. ...
DETAILED DESCRIPTION OF NON-LIMITING EXAMPLE EMBODIMENTS
In the following, the present embodiment is described.
FIG. 1is a functional block diagram of a game system according to the present embodiment. InFIG. 1, a game system1includes: a household television receiver (hereinafter, referred to as “monitor”)2which is one example of display means; a stationary game apparatus body3connected to the monitor2through a connection cord not shown; and a controller6wirelessly connectable to the game apparatus body3.
The monitor2displays a game image outputted from the game apparatus body3.
The game apparatus body3performs game processing and the like on the basis of a game program and the like stored in a predetermined storage medium (for example, memory card, optical disk, hard disk, or the like) that is readable by the game apparatus body3. In the present embodiment, the game apparatus body3includes a processor section11, a main memory12, a system LSI13, a wireless communication section14, an AV-IC (audio video-integrated circuit)15, and the like.
The processor section11executes a predetermined information processing program by use of the main memory12, the system LSI13, and the like. Accordingly, various functions (game processing, for example) in the game apparatus body3are realized.
The system LSI13includes a GPU (graphics processor unit)16, a DSP (digital signal processor)17, an input/output processor18, and the like.
The GPU16generates an image in accordance with a graphics command (image creation command) from the processor section11. The DSP17functions as an audio processor, and generates audio data by use of sound data and sound waveform (tone) data stored in the main memory12. The input/output processor18performs, for example, transmission/reception of data to/from the controller6through the wireless communication section14. Specifically; the input/output processor18receives, through the wireless communication section14, operation data and the like transmitted from the controller6, and (temporarily) stores the received operation data and the like in a buffer region of the main memory12.
Of the image and audio generated by the game apparatus body3, image data and audio data to be outputted to the monitor2are read out by the AV-IC15. Through an AV connector not shown, the AV-IC15outputs the read image data to the monitor2, and outputs the read audio data to a speaker built in the monitor2.
The controller6transmits, to the game apparatus body3, operation data indicative of the content of an operation performed on the controller6. Here, with reference toFIG. 2toFIG. 3, the controller6used in the present embodiment is described.FIG. 2is a front view showing an external view of the controller6. The controller6includes: a housing61including grips62L,62R at the left and the right (hereinafter, these may be collectively referred to as “grip62”); a first analog stick63and a second analog stick64which respectively protrude from openings provided on the surface of the housing61; and a digital button section including a plurality of operation buttons. The digital button section includes a cross key65, first type operation buttons66A to66D, second type operation buttons67A to67C, an L button68L, an R button68R, and a power button69. The first type operation buttons66A to66D are assigned, as appropriate, with functions corresponding to a game program performed by the game apparatus body3to which the controller6is connected (it should be noted that the L button68L and the R button68R are also assigned, as appropriate, with functions corresponding to the game program). For example, the operation buttons66A to66D are used in an accelerator operation, a brake operation, and the like for the own vehicle object in a race game described later. The second type operation buttons67A to67C are assigned with functions directly controlled by the system of the game apparatus, for example. For example, the second type operation buttons67A to67C are used as a home button, a start button, and a selection button.
The first analog stick63and the second analog stick64are each a joystick which is operable by being tilted in any desired direction (in any direction in 360 degrees) within a plane, with a neutral state which is a non-operation state set as a center. The first analog stick63and the second analog stick64are each used for instructing (inputting) the desired direction. In the present embodiment, the first analog stick63is used in steering operation in the race game described later.
Next, with reference toFIG. 3, an internal configuration of the controller6is described.FIG. 3is a functional block diagram showing a configuration of the controller6. InFIG. 3, the controller6includes a communication section75, a digital button section72, and an analog stick section73. These component sections are electrically connected to one another.
The digital button section72outputs, to a microcomputer751of the communication section75, signals indicative of an input state regarding the first type operation buttons66A to66D, the second type operation buttons67A to67C, the L button68L, the R button68R, and the power button69described above (i.e., whether or not each operation button has been pressed).
The analog stick section73outputs, to the microcomputer751of the communication section75, signals indicative of input states regarding the first analog stick63and the second analog stick64described above. The analog stick section73is capable of detecting an input signal to each analog stick in multiple stages, for example, a direction input for a certain direction in 256 stages. For example, when a neutral position (neutral state being a non-operation state) is defined as 0, and a state where the analog stick is slid to its maximum in a certain direction is defined as 255, a signal indicative of how much the tilt is (hereinafter, referred to as tilting degree) can be outputted to the microcomputer751.
The communication section75includes the microcomputer751, a memory752, a wireless module753, and an antenna754. The microcomputer751generates operation data on the basis of the above-mentioned signals obtained from the digital button section72and the analog slick section73, while using the memory752as a storage region when performing processing. Then, the microcomputer751controls the wireless module753to wirelessly transmit the operation data to the game apparatus body3.
In the description below, as one example of a controller with which to perform operation on an own vehicle object in a race game described later, the controller6as described above will be described. However, the controller to be used in operation on the own vehicle object is not limited thereto. In another embodiment, for example, a controller having built therein a motion detection sensor such as an acceleration sensor, an angular velocity sensor, or an inertial sensor may be used. In this case, for example, the tilt (attitude) of the controller itself is detected and the detected tilt may be used as the operation data (steering operation). For example, a controller having a shape similar to a steering wheel as shown inFIG. 4may be used. The steering wheel controller has built therein a motion detection sensor mentioned above, and by use of the motion detection sensor, the tilt of the steering wheel controller is detected and the detected tilt may be used as the operation data.
For example, a controller8having a shape as shown inFIG. 5may be used.FIG. 5is a perspective view of the controller8viewed from the front rear side thereof. The controller8inFIG. 5includes: a housing81; and an operation section composed of a plurality of operation buttons provided on the surface of the housing81. The housing81has a generally parallelepiped shape extending in the longitudinal direction from front to rear. The whole housing81can be held with one hand by an adult or even a child. The housing81is formed by a plastic molding, for example. The controller8also has built therein a motion detection sensor as described above. A player may perform an operation similar to that performed with a steering wheel, by holding with both hands the controller8so as to extend sideways.
Other than this, a controller9with a display device as shown inFIG. 6may be used. The controller9has a housing91formed by plastic molding, for example. In addition, the controller9includes, as an operation section, two analog sticks92, a cross key, a plurality of operation buttons, and the like. The controller9also includes a motion detection sensor. The player can perform a steering operation by pressing each button provided to the controller9, or by moving the controller9to change the position and the attitude thereof.
The processing described in the present embodiment can also be applied to a handheld game apparatus (an apparatus in which a controller and a game apparatus are integrated with each other) as shown inFIG. 7other than the stationary game system as described above. Furthermore, such a handheld game apparatus may have built therein a motion detection sensor as described above.
Next, the outline of operation of information processing (information processing performed in each handheld game apparatus) performed in an information processing system according to the present embodiment is described. In the present embodiment, a race game is described as an example.FIG. 8is one example of a game screen according to the present embodiment. In this race game, a game image obtained by taking an image of a virtual three-dimensional space by means of a virtual camera is displayed. InFIG. 8, an own vehicle object101is displayed. The player performs an operation on the own vehicle object101, by use of the controller6described above. In this game, an image of a so-called TPS view is displayed, basically. However, the image may be switchable between the TPS view and an FPS view by a predetermined operation.
Operation on the own vehicle object101is described. In the present embodiment, a steering operation of the own vehicle object101can be performed by use of the first analog stick63of the controller6. That is, a steering operation can be performed by tilting the first analog stick63in the left-right direction. In other words, an input for instructing the moving direction of the own vehicle object101can be performed. An accelerator operation can be made by use of the A button66A, and a brake operation can be made by use of the B button66B. In the present embodiment, items that can be obtained during the race are arranged on the course. By pressing the R button68R, for example, the player can “use” an item that the player has obtained. Use of an item, or for some items, a mere possession thereof, generates a predetermined effect that is advantageous for the player.
According to the present embodiment, in the race game as describe above, a process that supports a beginner of the race game or a player who is poor at the race game is performed so that the player can comfortably play the race game. Specifically, data of a steering wheel input based on a steering operation performed by the player is subjected to a process described later, whereby the value of the steering wheel input is corrected and steering wheel control and movement control of the own vehicle object101are performed.
Here, supplementary description of the value of a steering wheel input is given. In the present embodiment, the first analog stick63can detect a direction input to a direction, in 256 stages. With respect to a value in the left-right direction that can be inputted by the player by use of the first analog stick63(the value indicative of the tilting degree), it is assumed that the detected content is converted into a value within a range of −1 (left) to +1 (right) (0 is the neutral position), and the resultant value is used. In other words, a steering wheel input value that can be inputted by the player by use of the first analog stick63is a value within the range of −1 to +1. Meanwhile, in the race game in the present embodiment, as a steering wheel input value for controlling the own vehicle object101, a range of −2 to +2 is assigned. That is, the steering wheel input value in the range of −1 to +1 based on an input operation performed by the player is corrected by a process described later, and consequently; can become a value in the range of −2 to +2. For example, a steering wheel input value of −1 inputted by the player is corrected to, for example, −2 through the process described later, and this corrected steering wheel input value is to be used in movement control of the own vehicle object101. Accordingly, the own vehicle object101can also be moved by an amount corresponding to not less than a steering wheel input value that can be inputted by the player.
To be more specific, with respect to the correction (support process) of a steering wheel input value as described above, the following processes are mainly performed in the present embodiment.
(1) Off-Course Prevention Process
When the own vehicle object101is likely to go off the course, a process is performed in which a steering wheel input value based on an operation performed by the player trying to avoid the off-course is corrected so as to have a greater value such that the off course is prevented.
(2) Predictive Steering Process
When the own vehicle object101is not likely to go off the course at present but it is predicted that, irrespective of the presence/absence of a steering wheel input, the own vehicle object101is likely to go off the course if the own vehicle object101continues advancing as is, a process of correcting a steering wheel input that directs the own vehicle object101toward the travelling direction of the course is performed in advance so as to prevent the off-course.
(3) Basic Assistance Process
When a steering wheel input by the player is an input that directs the own vehicle object101toward the travelling direction of the course (toward the goal) (in other words, an input that causes neither an intentional reverse travel nor an intentional off-course), a process is also performed that corrects a steering wheel input value so as to direct the own vehicle object101toward the travelling direction of the course in accordance with the distance from the left and right edges (walls) of the course.
(4) Course Orientation Alignment Process
In a state where the risk of the own vehicle object101going off the course is low with respect to the position and the predicted traveling line of the own vehicle object101, a process is also performed that corrects a steering wheel input value so as to allow the own vehicle object101to travel along the course as much as possible. In other words, in this process, in a state where the off-course risk and the like is low, a steering wheel input value is corrected so as to cause the attitude (orientation) of the own vehicle object101to be close to an attitude (orientation) along the course.
Through the processes as described above, even a beginner of a race game or a player who is poor at a race game can cause the own vehicle object101to travel along the course without causing off-course or the like. Accordingly, interest of the race game can be enhanced. In addition, since movement control of the own vehicle object101is performed by correcting the steering wheel input value based on an operation performed by the player, it is possible to support the steering operation without giving the player a unnatural feeling with respect to the behavior of the own vehicle object101. For example, compared with control of directly correcting the speed of an own vehicle object irrespective of a steering operation performed by the player, it is possible to perform natural correction that fits the content of the steering operation actually performed by the player. Thus, it is possible to realize the support of the steering operation as described above without giving the player an uncomfortable feeling.
Even in a case where the player plays with another player in a competition play, and the opponent player is good at a race game, the assistance process as described above allows a relatively competitive race to be realized, whereby interest of the game can be enhanced (supplementary information: as a player is poorer at the race game, the player is likely to receive more benefits of the assistance process as described above, accordingly; and if a player is good at the race game, the assistance process as described above is less likely to be performed. As a result, a competitive race can be expected).
Next, with reference toFIG. 9toFIG. 34, game processing in the present embodiment is described in more details.
FIG. 9shows one example of a program and information stored in the main memory12of the game apparatus body3. In the main memory12, a game processing program301, operation data302, race course data305, path data306, assistance use setting data307, assistance-process course information308, player steering wheel input value309, and the like are stored.
The game processing program301is a program for performing the race game processing as described above.
The operation data302is data indicative of various operations performed on the controller6. The operation data302includes digital button data303, analog stick data304, and the like. The digital button data303is data indicative of the content of operation performed on each of various digital buttons as described above, and is data indicative of a pressed state of each of the various buttons. In the present embodiment, the digital button data303is data indicative of ON or OFF. The analog stick data304is data indicative of the content (tilting direction and tilting degree) of operation performed on the analog sticks. With respect to each of the two analog sticks, the analog stick data304expresses, in 256 stages, a tilting degree in a given direction.
The race course data305is data for constructing a race course described above. The race course data305includes data and the like regarding the shape of the course and objects arranged on the course.
The path data306is data generated in advance on the basis of the course of the race game, and is data serving as the basis for “paths” to be used in the processing described later. The concept of the paths is described with reference toFIG. 10toFIG. 11.FIG. 10is a bird's eye view of a part of the race course.FIG. 11is a schematic diagram indicative of the concept of the paths generated on the basis of the race course. A plurality of paths are assumed to be arranged along the race course. In other words, each of the paths is assumed to correspond to a part of the race course. InFIG. 11, each path is indicated as a circle, but in the game processing, each path is assumed to have a sphere shape. Specifically, for each of the plurality of the paths, the path data306includes the center coordinate, the radius (size), information indicative of the normal, information indicative of the next path in the order of the paths, and information indicative of the immediately preceding path in the order. The path data306also includes information indicative of whether the path is a branched path or a normal path described later. With respect to the “order” of the paths, the path at the start point of the race course is the first path, and the path at the goal point is the last path. With respect to the center coordinate, if the axis indicative of the road width is defined as an x-axis, the height direction is defined as a y-axis, and the depth direction is defined as a z-axis, for example, the y-axis coordinate is set to be on the road surface (ground surface) of the course, in principle. The x-axis coordinate is set to be at the center of the road width. Therefore, if the center points (x-axis coordinates) of the respective paths are connected together along the course, a line that substantially extends along the center line of the race course is created (seeFIG. 12). As seen fromFIG. 11andFIG. 12, each path can be considered as indicating the road width and the left and right edges (in other words, the border between the outer side and the inner side of the course) of the course at the position of the path (depending on the race course, for example, in a case of a tunnel-like or tube-like course, the height and the like of the course is also indicated). Thus, the path data306can also be considered as data indicative of the configuration of a predetermined part of the race course. In the present embodiment, by use of the path data306, ascertainment of the path that the own vehicle object101has just passed and prediction of the travelling direction immediately after the path are performed. In a case where the course is branched, the path data306is also used in determination and the like of the branch destination. In the description below, the left and right edges in the width direction axis of the course described above will be collectively referred to as “course edge”. In other words, in the description of the present embodiment, “course edge” means neither the start point nor the goal point, but means the left/right edge in the width direction of the course.
Here, supplementary description of a branch of the course is given. In the race game in the present embodiment, when the own vehicle object101has satisfied a predetermined condition, a branched course emerges. For example, when the own vehicle object101has obtained a predetermined item disposed on the race course, a branched course emerges while the own vehicle object101possesses the item (until the own vehicle object101newly obtains another item), and the own vehicle object101becomes able to be moved to the branched course. For example, it is assumed that there are a course and path settings as shown inFIG. 13. FIG.13is a bird's eye view of a hairpin curve. In addition, it is assumed that “lawn” is present at a middle portion with respect to the course. Then, it is assumed that the own vehicle object101is travelling on the right side. It is assumed thatFIG. 13shows a state where the above-mentioned predetermined condition has not been satisfied. In this case, the own vehicle object101is only allowed to travel within the course, and is not allowed to enter the lawn portion. Meanwhile, when the predetermined condition has been satisfied, as shown inFIG. 14, six paths that correspond to a branched course emerge in the lawn portion. Then, the own vehicle object101becomes able to enter the portion where these paths are arranged. That is, while a predetermined condition is satisfied, a branched course emerges that allows the own vehicle object101to “go across the lawn”. A lawn is shown in this example, but in a case where a course is branched into two according to the design thereof (seeFIG. 15), it is needless to say that the travelling direction can be branched without requiring satisfaction of the predetermined condition. In the description below, a path having a plurality of paths either before or after the path may be referred to as “branched path”, and a path not having a plurality of paths either before or after the path may be referred to as “normal path”. In addition, the center point (center coordinate) of each path will be referred to as “center path point”, the path point at the right edge will be referred to “right edge path point”, and the path point at the left edge will be referred to as “left edge path point”.
With reference back toFIG. 9, next, the assistance use setting data307is data indicative of whether or not the player uses the steering wheel assistance function as described in the present embodiment. For example, the assistance use setting data307is set on the basis of an input performed by the player, in “game setting” and the like of the race game.
The assistance-process course information308is data generated on the basis of the path data306described above, and is used in order to ascertain the left and right edges of the race course in determination and the like regarding off-course, for example.
The player steering wheel input value309is generated on the basis of the operation data302, more specifically, on the basis of the analog stick data304. The player steering wheel input value309is data indicative of the content of steering operation (steering wheel input amount) of the own vehicle object101based on an input onto the first analog stick63performed by the player. Specifically, the player steering wheel input value309is data obtained by converting, for each of the left and right directions of the first analog stick63, the tilting degree of the first analog stick63expressed in 256 stages into a value within the range of −1 to +1, with 0 set at as a neutral position.
Next, with reference to the flow chart shown inFIG. 16, the flow of a steering wheel assistance process in the race game performed by the processor section11of the game apparatus body3is described. Here, the process regarding the steering wheel assistance as described above is mainly described, and description of the other game processing is omitted because the other game processing does not have direct relevance.
FIG. 16is a flow chart showing details of the steering wheel assistance process according to the present embodiment. The process loop of steps S2to S7inFIG. 16is repeatedly performed every frame, for example.
First, in step S1, the processor section11performs a path data pre-interpretation process. In this process, on the basis of the path data306, a process of generating a plurality of paths as shown inFIG. 11above is performed. Further, on the basis of the generated paths, a process of generating the assistance-process course information308is performed.FIG. 17shows the concept of the assistance-process course information308.FIG. 17is an example of the assistance-process course information308based on the paths as shown inFIG. 11above. The assistance-process course information is information that can be expressed by a line connecting the center points of the respective paths, a line connecting the right edge path points, and a line connecting the left edge path points.
With reference back toFIG. 16, next, in step S2, the processor section11obtains the operation data302. Further, on the basis of the operation data302, the processor section11generates the player steering wheel input value309indicative of a steering wheel input value according to an input performed by the player (i.e., the tilting degree in each of the left and right directions of the first analog stick63is converted into a value within the range of −1 to +1).
Next, in step S3, the processor section11refers to the assistance use setting data307and determines whether use of “steering wheel assistance” has been set. As a result of the determination, if the use of “steering wheel assistance” has not been set (NO in step S3), the processor section11performs, in step S4, a process of moving the own vehicle object101not using the assistance. That is, the processor section11performs control of the attitude and movement of the own vehicle object101using the player steering wheel input value309as is. Then, the process is returned to step S2, to be repeated.
Meanwhile, when use of “steering wheel assistance” has been set (YES in step S3), the processor section11performs a path determination process in step S5.
[Path Determination Process]
Here, the outline of processes performed in the path determination process is described with reference toFIG. 18toFIG. 20. In this process, a process of determining two paths for each of before and after the current position of the own vehicle object101is performed. In a case where there is a branch, a process of determining a branch destination is also performed. Specifically, first, on the basis of the position and orientation of the own vehicle object101, a path point that is nearest to the own vehicle object101is searched for. In the following, this path point is referred to as “reference path point”. In the search for the reference path point, control of preferentially selecting path points before and after the path point selected last time is also performed. Further, a process is also performed in which path points set before and after the reference path point are searched for, and whether the reference path point corresponds to a “normal path” or a “branched path” is determined (i.e., if a plurality of path points are present at either before or after the reference path point, the reference path point is determined as corresponding to a “branched path”). Since the presence/absence of a branch destination with reference the current position is determined in real time, even a case where a “hidden route” has suddenly emerged due to satisfaction of a predetermined condition, for example, can be flexibly managed.
When the reference path point has been determined, next, on the basis of the moving speed and the steering wheel input value of the own vehicle object101, “reference direction” is calculated. This reference direction is expressed in the form of a direction vector indicative of the travelling direction of the own vehicle object at that time point. Further, by use of the reference direction, two path points for each of before and after the reference path point are determined. In the following, the two path points before and after the reference path point are referred to as a first front path point, a second front path point, a first rear path point, and a second rear path point. When the reference path point corresponds to a branched path as described above, the branch destination thereof is also determined. One example of how to determine a first front path point when the reference path is a branched path is described, using the positional relationship between the own vehicle object and paths as shown inFIG. 18. InFIG. 18, the own vehicle object101, a reference direction (vector)401, a path402that is nearest to the own vehicle object101, and a reference path point403thereof are shown. In addition, the path402, is a branched path, and as paths that are to serve as branch destinations (candidate paths), a first candidate path404and a first candidate path point405as the center point thereof, a second candidate path406and a second candidate path point407as the center point thereof are also shown. In the case of this positional relationship, first, it is determined whether a candidate path (assumed as having a sphere shape) that is to collide is present ahead of the reference direction401. In the case ofFIG. 18, only the second candidate path406is in the relationship of colliding with the reference direction401. Thus, when there is only one candidate path that collides, the path point (the second candidate path point407) of the colliding candidate path is determined as the first front path point (in other words, the next path point).
Next, an example in which there are a plurality of candidate paths that will collide with the reference direction401is described with reference toFIG. 19.FIG. 19shows a positional relationship in which both the first candidate path404and the second candidate path406will collide with the reference direction401. In this case, first, direction vectors411and412respectively directed from the own vehicle object101to candidate path points (in the example shown inFIG. 19, the first candidate path point405and the second candidate path point407) are calculated. Then, of the calculated direction vectors, a direction vector that is nearest to the reference direction401is determined, and the candidate path point according to the direction vector is determined as the next path point (first front path point). In the example shown inFIG. 19, since the direction vector412is nearer to the reference direction401than the direction vector411, the second candidate path point407is determined as the first front path point.
Next, an example of a case where there is no path that will collide with the reference direction401is described with reference toFIG. 20.FIG. 20shows a positional relationship in which the reference direction401collides with neither the first candidate path404nor the second candidate path406. In this case, of the direction vectors from the reference path point403toward the path points405and407of the respective candidate paths, the path point according to a vector that is nearest to the reference direction is determined as the first front path point. In the example shown inFIG. 20, since the direction vector412is nearer to the reference direction401than the direction vector411, the second candidate path point407is determined as the first front path point.
The second front path point is also determined through a process similar to that described above. That is, using a path according to the first front path point as the reference path (the reference direction is used as is), a process similar to that described above is performed.
With respect to determination of the first rear path point, first, paths that the own vehicle object101have passed are stored (for example, eight paths at maximum are stored). Then, if there is a path that the own vehicle object101has passed when rear path candidates described above are searched for, the path point according to the path is determined as the first rear path point. Meanwhile, in a case where no path point that the own vehicle object101has passed s stored, a process similar to that described above is performed by use of a vector obtained by reversing the reference direction described above. Also for determination of the second rear path point, a similar process is performed.
When the reference path point and two path points for each of before and after the reference path point have been determined as described above, a path interpolation process is further performed. The interpolation process is a process of performing curve interpolation on the basis of the right edge path point and the left edge path point of each of the five paths determined as above. In other words, the interpolation process is a process of calculating the left and right edges (walls) of the course on the basis of the above five path points (a process of fixing the size of the left-right width of the course, so to speak). By connecting the right edge path points of the respective five paths determined above while performing curve interpolation, the right edge of the course before and after the own vehicle object101(a concept such as a wall indicative of the right edge in the course width, so to speak) is calculated. Similarly, by connecting the left edge path points while performing curve interpolation, the left edge of the course before and after the own vehicle object101(a concept such as a wall indicative of the left edge in the course width, so to speak) is calculated. Information of the edges of the course calculated in this manner is used as “course edge” in the off-course prevention process and the like described later. In addition, by performing such curve interpolation, even when the own vehicle object101is caused to travel by use of an assistance process described later, smooth travel can be realized.
Since the left and right edges of the course are generated on the basis of the paths described above, the left and right edges of the course need not strictly match the positions of the left and right edges of the race course actually displayed on the screen, and may be at slightly shifted positions.
Meanwhile, the path determination process as described above can also be considered as real time determination (ascertainment) of the configuration of the course (positions and the like of the course edge) in the surroundings of the own vehicle object101. Thus, with respect to the course branching as described above, even in a case where a branched course emerges only when a predetermined condition has been satisfied, a flexible management can be realized. Accordingly, expanded gimmicks and the like of the race course can be realized, and interest of the game can be enhanced.
Next,FIG. 21shows a flow chart showing details of the path determination process. With reference toFIG. 21, first, in step S11, the processor section11performs a process of calculating and determining the reference direction and the reference path point as described above. In addition, a process is performed that determines whether the determined reference path point corresponds to a normal path or a branched path.
Next, in step S12, the processor section11performs a process of determining four path points as described above, i.e., the first front path point, the second front path point, the first rear path point, and the second rear path point.
Next, in step S13, the processor section11performs the interpolation process as described above, on the basis of the determined five path points. Then, the path determination process ends.
With reference back toFIG. 16, when the path determination process has ended, the processor section11performs the assistance process in step S6, next.FIG. 22is a flow chart showing details of the assistance process. InFIG. 22, first, the processor section11performs the off-course prevention process in step S21.
[Off Course Prevention Process]
The off-course prevention process is described with reference toFIG. 23.FIG. 23is a schematic diagram showing some examples of the off-course prevention process. First, this process is performed in a state where the own vehicle object101is very close to the course edge, in other words, in a state where off-course is about to happen. With reference to the examples shown inFIG. 23, the execution condition thereof is the presence of a state in which (a part of) the own vehicle object101is present to the left side relative to a threshold line451A, or to the right side relative to threshold line451B. Then, on the basis of the a speed vector452(the speed and direction) of the own vehicle object101and the orientation (the direction in which the own vehicle object101should travel) of the course edge that is nearest from the own vehicle object101, a direction in which to forcedly rotate the steering wheel (additionally to the control according to the steering wheel input value from the player) and the amount of the forced rotation (correctively indicated as a correction amount453inFIG. 23) are calculated. Here, the speed vector452includes components indicative of the moving speed of the own vehicle object101and the direction in which the own vehicle object101moves.
FIG. 23shows four examples (Cases). In these examples, for all the Cases, the orientation of the course edge described above (travelling direction) is the up-direction in the drawing. In these examples, the own vehicle object101is approaching the course left edge at an angle closer to a right angle (meaning “perpendicular”) in Case2than in Case1. In addition, the own vehicle object101is approaching the course left edge at an angle further closer to an right angle in Case3than in Case2. Thus, the steering wheel needs to be rotated by a greater amount in Case2than in Case1. In addition, the steering wheel needs to be rotated by a greater amount in Case3than in Case2. Therefore, although the direction in which to rotate the steering wheel is the right direction in all the cases, with respect to the amount of the rotation (correction amounts453A to453C), the correction amount453B of Case2is calculated so as to be greater than the correction amount453A of Case1. Further, the correction amount453C of Case3is calculated so as to be greater than the correction amount453B of Case2. In other words, control is performed such that: as the angle of the speed vector452relative to the course edge becomes closer to a right angle, the correction amount thereof is calculated so as to be greater, accordingly; and as the angle between the speed vector452and the travelling direction becomes smaller, the correction amount thereof also becomes smaller, accordingly.
Separately from the direction in which to rotate the steering wheel and the amount of the rotation described above, forced movement vectors454A to454C each indicative of a force that forcedly moves the own vehicle object101are also calculated on the basis of the speed vector452of the own vehicle object101and the orientation of the course edge (the direction in which the own vehicle object101should travel). Since occurrence of off-course may not be prevented by the above-described correction of the steering wheel input value alone, the forced movement vector is used, separately from the correction of the steering wheel input value, to cause the own vehicle object101to move away from the course edge (in such a manner as to cause the own vehicle object101to slide to the inner side of the course, with the attitude of the own vehicle object101maintained). More specifically, an acceleration based on the forced movement vector is applied to the own vehicle object101. That is, movement based on the forced movement vector is added to the movement of the own vehicle object101based on the corrected steering wheel input value. Also with respect to the forced movement vector, the forced movement vector454B of Case2is stronger (longer) than the forced movement vector454A of Case1, and the forced movement vector454C of Case3is stronger than the forced movement vector454B of Case2. In these examples, since the speed vector is oriented to the travelling direction side, the direction of the forced movement vector is the right direction in all of Cases1to3.
With respect to Case4, a state is shown in which the own vehicle object101is approaching the course right edge with a slightly reversed orientation. Also in this case, on the basis of the speed vector452of the own vehicle object101and the orientation of the course edge (the direction in which the own vehicle object101should travel), the steering direction to be corrected and a correction amount453D, and a forced movement vector454D are calculated. In this case, since the speed vector of the own vehicle object101includes a component in a reverse direction to the travelling direction, a forced movement vector toward the left-up direction (a vector in a reverse direction to the speed vector452) is calculated in order to make it easier to direct the own vehicle object101to the travelling direction side.
Thus, in the off-course prevention process, in a case where occurrence of off-course cannot be avoided if the current state continues, a correction amount of the steering wheel input value and a forced movement vector for preventing occurrence of off-course are calculated on the basis of the speed vector of the own vehicle object101and the orientation of the course edge that is nearest from the own vehicle object101.
According to the present embodiment, in the off-course prevention process, a correction direction/correction amount of the steering wheel input value and a forced movement vector are calculated in order to ensure prevention of off-course of the own vehicle object101. In other words, even if the player intentionally tries to make the own vehicle object101go off the course, the off-course is prevented as long as the off-course prevention process is functioning.
FIG. 24shows a flow chart of the off-course prevention process. With reference toFIG. 24, first, in step S31, the processor section11determines whether the condition for performing the off-course prevention process as described above has been satisfied. In the examples above, whether the own vehicle object101is present to the outer side (the side nearer to the course edge) of the threshold line451A or451B is determined, and if the own vehicle object101is present to the outer side, it is determined that the execution condition has been satisfied. It should be noted that this determination process is not limited to the determination process that uses the threshold line451as described above, and may use any determination process as long as similar determination can be performed.
As a result of the determination in step S31, if the execution condition has not been satisfied (NO in step S31), the off-course prevention process ends. That is, the off-course prevention process is not performed in this case. Meanwhile, if it is determined that the execution condition has been satisfied (YES in step S31), the processor section11calculates the speed vector452of the own vehicle object101in step S32. Further, in step S33, the processor section11calculates the orientation of the course edge that is nearest from the own vehicle object101. Then, in step S34, the processor section11calculates the steering wheel input correction amount453and the forced movement vector454on the basis of the speed vector452and the orientation of the course edge. Then, the off-course prevention process ends.
With reference back toFIG. 22, in step S22following the off-course prevention process, the processor section11determines whether the own vehicle object101is in contact with a road surface portion of the race course. In other words, it is determined whether the own vehicle object101is not in the air (due to jumping or the like). As a result of the determination, if the own vehicle object101is not in contact with the road surface (NO in step S22), the basic assistance process described later is performed in step S24. Meanwhile, if the own vehicle object101is in contact with the road surface (YES in step S22), the processor section11determines, in step S23, whether the control for off-course prevention described above has been performed. That is, it is determined whether the determination result in step S31inFIG. 24is YES. As a result, if the control for off-course prevention has been performed (YES in step S23), the processor section11performs the basic assistance process in step S26. Meanwhile, if the control for off-course prevention has not been performed (NO in step S23), the processor section11performs the predictive steering process in step S25, and then, performs the basic assistance process in step S26.
[Predictive Steering Process]
The predictive steering process and the basic assistance process are described. First, the predictive steering process is described.FIGS. 25 to 26are diagrams for describing the outline of processes performed in the predictive steering process. In this process, in a case where occurrence of off-course, although not immediately, is predicted if the own vehicle object101continues advancing as is, the steering wheel input is corrected so as to realize a state where the own vehicle object101can travel along the direction in which the own vehicle object101should travel in the course, in order to reduce the risk of off-course.FIG. 25shows one example of correction obtained through predictive steering at the time when the own vehicle object101is traveling straight (including a case where the player is not performing steering operation).FIG. 26shows an example of predictive steering at the time when the own vehicle object101is not traveling straight, i.e., in a state where there is a steering wheel input in either the left direction or the right direction, or in a state where the own vehicle object101is “drifting”.
First, a condition of performing the predictive steering process is described. This process is performed when control for off-course prevention has not been performed and when a direct distance d between the own vehicle object101and the course edge is shorter than a predetermined value. That is, this process can be performed in a state where the own vehicle object101is near the course edge to some extent.
As a process of predictive steering in a case where the own vehicle object101is traveling straight, the following process is performed. First, on the basis of the speed vector452of the own vehicle object101, a traveling line461of the own vehicle object101is predicted. Next, on the basis of the predicted traveling line461, the point of collision between the own vehicle object101and the course edge is predicted (hereinafter, this point is referred to as “predicted collision point”). Then, the orientation (travelling direction) of the course edge at this predicted collision point is calculated. InFIG. 25, the predicted collision point and the orientation thereof are indicated as a course edge orientation462composed of a dot and an arrow.
Here, in the present embodiment, the predicted collision point is calculated on the basis of the left/right edge in the width of the own vehicle object101used as a reference. In the example shown inFIG. 25, the own vehicle object101is predicted to collide with the left course edge, and thus, a straight line connecting the left edge of the own vehicle object101and the course edge is used in calculation of the course edge orientation462(in a case where collision to the right course edge is predicted, a straight line connecting the right edge of the own vehicle object101and the course edge is used in the calculation). In another embodiment, not limited thereto, a straight line passing the center of the own vehicle object101may be used to calculate the predicted collision point, for example.
When the course edge orientation462has been calculated as described above, the direction in which to forcedly rotate the steering wheel and the amount of the rotation, i.e., the steering wheel input correction amount453, are calculated on the basis of the course edge orientation462and the speed vector452(speed component and orientation component). InFIG. 25, rightward rotation of the steering wheel and the correction amount thereof are calculated. Thus, even if the player is not performing steering operation in a state as shown inFIG. 25, a certain level of steering wheel input is generated rightward, and the orientation (attitude) of the own vehicle object is changed so as to slightly match the travelling direction of the course.
Here, supplementary description of the correction amount (the direction in which to rotate the steering wheel and the amount of the rotation) of the steering wheel input value is given with reference toFIG. 27. As shown in Case1inFIG. 27, as a distance d from the own vehicle object101to the course edge is larger and the orientation of the course and the orientation of the own vehicle object101at the predicted collision point are closer to each other, the correction amount is calculated so as to become smaller, accordingly. As shown in Case2, as the distance d from the own vehicle object101to the course edge is smaller and the orientation of the course and the orientation of the own vehicle object101at the predicted collision point are more deviated from each other, the correction amount is calculated so as to become larger, accordingly.
Next, the predictive steering process performed when the own vehicle object101is not traveling straight as shown inFIG. 26is described. In the above-described case where the own vehicle object101is traveling straight, the traveling line461also becomes a straight line, and thus, the correction amount453of the steering wheel input value is calculated by use of the orientation component indicated by the speed vector452. Meanwhile, in a state where there is a steering wheel input in either the leftward direction or the rightward direction, or in a state where the own vehicle object101is drifting, the predicted traveling line is no longer a straight line. Thus, when the own vehicle object101is not traveling straight, the orientation of the own vehicle object101predicted at the predicted collision point is used, instead of the orientation component of the speed vector452. With reference toFIG. 26, the correction amount453of the steering wheel input value is calculated by use of the orientation indicated by an orientation-at-collision463, not the orientation of the speed vector452.
Here, with reference toFIG. 28, supplementary description is given of a case where the predictive steering process is performed and a case where the predictive steering process is not performed. InFIG. 28, a case is assumed in which the player is causing the own vehicle object101to pass through a curve while performing a steering wheel input (not intented to cause off-course). In this case, in the state shown in Case1ofFIG. 28, occurrence of off-course is predicted, and thus, the predictive steering process is performed. As a result, a steering wheel input that directs the own vehicle object101toward the course inner side is applied, in addition to the steering wheel input value from the player. Meanwhile, in the case of Case2ofFIG. 28, since occurrence of off-course is not predicted, the predictive steering process is not performed.
Next, a flow chart of the predictive steering process is shown inFIG. 29. With reference toFIG. 29, first, in step S41, the processor section11determines whether the execution condition of the predictive steering process as described above has been satisfied. If the execution condition has not been satisfied (NO in step S41), the predictive steering process ends. Meanwhile, if the execution condition has been satisfied (YES in step S41), the processor section11calculates the speed vector452of the own vehicle object101in step S42. In the next step S43, on the basis of the speed vector452, the processor section11calculates the predicted collision point and the course edge orientation462indicative of the orientation of the course at the predicted collision point as described above.
Next, in step S44, the processor section11determines whether the own vehicle object101reaches the predicted collision point within a predetermined time period (i.e., whether off-course occurs). As a result, if the own vehicle object101does not reach the predicted collision point within the predetermined time period (NO in step S44), the predictive steering process ends (corresponding to Case2inFIG. 28described above). Meanwhile, the own vehicle object101is predicted to reach the predicted collision point within the predetermined time period (YES in step S44), the processor section11calculates, in step S45, the orientation-at-collision463which is the orientation of the own vehicle object101at the predicted collision point.
Next, in step S46, the processor section11determines whether the own vehicle object101is traveling straight. As a result, if the own vehicle object101is traveling straight (YES in step S46), the processor section11calculates, in step S47, the correction amount of the steering wheel input value, on the basis of the speed component and orientation component of the speed vector452and the course edge orientation462at the predicted collision point described above. Meanwhile, if the own vehicle object101is not traveling straight (NO in step S46), the processor section11calculates, in step S48, the correction amount of the steering wheel input value, on the basis of the speed component of the speed vector452, the orientation-at-collision463, and the course edge orientation462. Then, the predictive steering process ends.
[Basic Assistance Process]
Next, the basic assistance process is described. In this process, in such a case where the steering wheel input performed by the player is an input that directs the own vehicle object101toward the travelling direction of the course, the steering wheel input value is corrected so as to make the attitude of the own vehicle object101closer to an attitude along the travelling direction of the course. This process is performed when the following condition is satisfied. The first condition is the presence of a steering wheel input from the player, or the presence of a steering wheel input based on the off-course prevention process or on the predictive steering process (i.e., steering operation is being generated through the above-described correction even when the player is not performing steering operation). The second condition is that the steering wheel input has been made so as to direct the own vehicle object101forward (travelling direction, goal direction) of the course. It should be noted that the steering wheel input based on the off-course prevention process or the predictive steering process is an input that directs the own vehicle object101forward of the course, and thus, substantially, it is sufficient that whether the steering wheel input performed by the player is an input that directs the own vehicle object101forward of the course can be determined. The third condition is that the own vehicle object101is present at a position near the course edge to some extent. Specifically, the third condition corresponds to a case where the own vehicle object101is present to the left side relative to a threshold line471A or to the right side relative to a threshold line471B inFIG. 30described next (the threshold line471is set so as to be shifted to the course inner side relative to that in the off-course prevention process). When these three conditions are all satisfied, the basic assistance process is performed.
With reference toFIG. 30, the outline of the processes performed in the basic assistance process is described.FIG. 30shows four Cases. In each of Cases1to3, (at least a part of) the own vehicle object101is present to the left side relative to the threshold line471A. In Case4, (at least a part of) the own vehicle object101is present to the right side relative to the threshold line471B. In the basic assistance process, first, the speed vector452of the own vehicle object101and the course edge orientation462of the course edge that is nearest to the own vehicle object101are calculated. Further, the distance d from the own vehicle object101to the course edge is also calculated. Then, on the basis of the steering wheel input value according to the input performed by the player, the distance d, the speed vector452, and the course edge orientation462, the correction amount453of the steering wheel input value, and a forced movement vector454similar to that in the off-course prevention process are calculated. In this process, with respect to the correction amount of the steering wheel input value, the direction in which to rotate the steering wheel (the orientation of the steering wheel) is not corrected here. Only with respect to the amount by which to rotate the steering wheel, a correction amount is calculated though, for example, multiplication by a predetermined multiplying factor. This is because, as described above, the presumption of this process is the presence of a steering wheel input that directs the own vehicle object101forward of the course, and there is no need to correct the orientation thereof.
The correction amount453of the steering wheel input value, and the magnitude of the forced movement vector454are calculated such that as the distance d becomes shorter, a stronger correction is made, accordingly. InFIG. 30, a greater correction amount is calculated in Case2than in Case1. A greater correction amount is calculated in Case3than in Case2.
In Case4, the own vehicle object101has a slightly reversed orientation. In the off-course prevention process, an example has been shown in which, in a state similar to this case, a vector in a direction reverse to that of a speed vector is calculated as the forced movement vector. Meanwhile, in this basic assistance process, the orientation of the forced movement vector454D is always in a direction perpendicular to the orientation of the course edge. This is because, in this process, not so strong correction as that in the off-course prevention process is made.
It should be noted that the basic assistance process and the off-course prevention process can be performed in an overlapping manner. Thus, the steering wheel input value could be corrected in some cases by the correction obtained through the off-course prevention process and the correction obtained through the basic assistance process being combined together.
FIG. 31shows a flow chart of the basic assistance process. With reference to FIG.31, first, in step S61, the processor section11determines whether the execution condition of the basic assistance process as described above has been satisfied. If the execution condition has not been satisfied (NO in step S61), the basic assistance process ends. If the execution condition has been satisfied (YES in step S61), the processor section11calculates the speed vector452of the own vehicle object101in step S62. Further, in step S63, the processor section11calculates the course edge orientation462of the course edge that is nearest from the own vehicle object101. Further, in step S64, the processor section11calculates the distance d from the own vehicle object101to the course edge. Then, in step S65, on the basis of the speed vector452, the course edge orientation462, the distance d, and the player steering wheel input value309, the processor section11calculates the correction amount453of the steering wheel input value and the forced movement vector454of the own vehicle object. Then, the basic assistance process ends.
With reference back toFIG. 22, next, in step S27, the processor section11determines whether control for off-course prevention or control for predictive steering has been performed (in the current process loop). As a result, if such control has been performed (YES in step S27), the assistance process ends. Meanwhile, if neither of the controls has been performed (NO in step S27), the processor section11performs the course orientation alignment process in step S28. Then, the assistance process ends.
[Course Orientation Alignment Process]
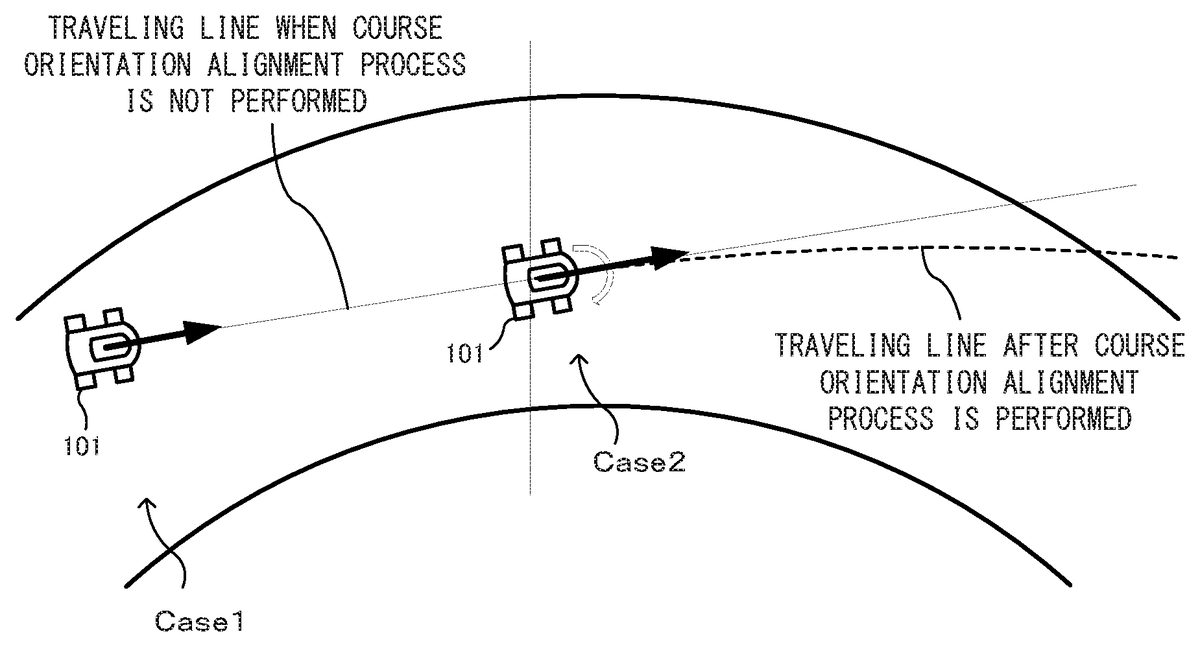
Next, with reference toFIG. 32, the outline of the course orientation alignment process is described. In this process, in a state where the risk of occurrence of off-course and the like is low, the steering wheel input value is corrected so as to allow the own vehicle object101to travel along the course as much as possible. The execution condition thereof is that the following three conditions are satisfied. The first condition is that, in the processes performed (in the current process loop), none of the assistance controls of the off-course prevention process, the predictive steering process, and the basic assistance process has been performed. The second condition is that the own vehicle object101is not in a drifting state. The third condition is the presence of a state in which the own vehicle object101is directed toward the outer side of the curve, or the presence of a state in which the own vehicle object101is directed toward the inner side of the curve and is predicted to collide with the course edge (i.e., go off the course).
In this process, the following processes are performed. First, calculation of the speed vector452of the own vehicle object101and calculation of the course edge orientation462that is nearest to the own vehicle object101are performed. Then, on the basis of the speed vector452and the course edge orientation462, calculation of the correction amount453of the steering wheel input value is performed. Here, in this process, as the course edge orientation462and the orientation of the speed vector452are more deviated from each other (i.e., as the angle therebetween is greater), the correction amount453is calculated so as to be greater, accordingly; and as the course edge orientation462and the orientation of the speed vector452is closer to each other (as the angle therebetween is smaller), the correction amount453is calculated so as to be smaller, accordingly. In the example shown inFIG. 32, with respect to the course edge orientation462and the orientation of the speed vector452(i.e., the angle therebetween), the difference between the orientations is greater in Case2than in Case1. Thus, the correction amount is calculated so as to have a greater value in Case2than in Case1. Further, when Case2and Case3are compared with each other, the difference between the orientations is greater in Case3than in Case2. Thus, the correction amount is calculated so as to have a greater value in Case3than in Case2.
In this process, control of preferentially using the steering wheel input performed by the player is also performed. For example, in a case where a steering wheel input from the player has been detected, control in which the correction amount is reduced or no correction is performed is also performed.
FIG. 33shows another example of the course orientation alignment process.FIG. 33shows one example of a case where the own vehicle object101passes a curve. First, in Case1shown inFIG. 33, the own vehicle object101is directed toward the inner side of the curve. In addition, in this state, there is no risk of the own vehicle object101colliding with the edge at the inner side of the curve. In this ease, the course orientation alignment process is not performed. Meanwhile, in Case2, the state has changed such that the own vehicle object101is at a middle portion of the curve and is directed toward the outer side of the curve. When a state has established in which the own vehicle object101is directed toward the outer side of the curve in this manner, the course orientation alignment process is performed. As a result, the traveling line of the own vehicle object101is changed so as to be oriented slightly toward the inner side.
As described above, according to the course orientation alignment process, in a state where the other assistance processes have not been performed, and the steering wheel input performed by the player is preferentially used, a slight correction is made such that the orientation of the own vehicle object101becomes closer to a direction along the course orientation.
FIG. 34shows a flow chart of the course orientation alignment process. With reference toFIG. 34, first, in step S71, the processor section11determines whether the execution condition of the course orientation alignment process as described above has been satisfied. As a result, if the execution condition has not been satisfied (NO in step S71), the course orientation alignment process ends. Meanwhile, if the execution condition has been satisfied (YES in step S71), the processor section11calculates the speed vector452of the own vehicle object101in step S72. Further, in step S73, the processor section11calculates the course edge orientation462that is nearest from the own vehicle object101.
Next, in step S74, the processor section11refers to the operation data302and determines whether a steering wheel input by the player has been made. As a result, if the steering wheel input by the player has not been made (NO in step S74), the processor section11calculates, in step S75, a correction value of a steering wheel input on the basis of the orientation of the speed vector452and the course edge orientation462. Meanwhile, if a steering wheel input by the player has been made (YES in step S74), the processor section11calculates, in step S76, a correction amount in consideration of the steering wheel input by the player. For example, a correction amount453is calculated so as to have a smaller value than the correction amount453calculated in the process of step S75. In another embodiment, 0 may be set as the correction amount, or alternatively, the process of step S76may not be performed. Then, the course orientation alignment process ends.
With reference back toFIG. 16, when the assistance process has ended, the processor section11reflects, in step S7, the result of the assistance process and causes the own vehicle object101to move. That is, a process is performed in which the player steering wheel input value309is corrected by use of the correction amount calculated in the assistance process described above, and movement control of the own vehicle object101is performed by use of the corrected value. Then, the process is returned to step S2, to be repeated.
This is the end of the detailed description of the steering wheel assistance process according to the present embodiment.
As described above, in the present embodiment, a correction amount is calculated by use of the assistance process as described above, and the steering wheel input value inputted by the player is corrected. Then, by use of the corrected steering wheel input value, movement control of the own vehicle object101is performed. Accordingly, without giving the player an uncomfortable feeling with respect to the motion of the own vehicle object101, it is possible to support the steering operation of the player. With the assistance process as described above, it is possible to support even a player poor at a race game such that the player can cause the own vehicle object101to travel well along the race course, whereby interest of the game can be enhanced.
Also with respect to the determination of the content of the correction described above, the correction amount is determined on the basis of the course edge as described above. Thus, appropriate correction is enabled, assuming a case where the player is likely to fail in causing the own vehicle object101to travel along the course, such as when off-course is likely to occur, or when, if the course edge is a wall, crash against the wall is likely to occur.
The control according to the steering wheel assistance process as described above is basically focused on avoidance of off-course (avoidance of collision with the course edge). However, in another embodiment, for example, in order to avoid collision with a predetermined object, the control process as described above may be applied. In this case, the process may be obtained by replacing the determination regarding collision (off-course) with the course edge in the process described above, with determination regarding collision with the predetermined object. In particular, as the matter that corresponds to the orientation (travelling direction, course edge orientation) of the course at the course edge in the process described above, a tangent which is at the predicted collision point with the predetermined object and which is the line at the travelling direction side of the course may be used. With respect to control to be performed, processes that correspond to the predictive steering process and the off-course prevention process described above may be performed.
Other than this, in a case of a competition race, the processes as described above may be applied. Here, in a case of a competition race, it is often difficult for a beginner to restore when the own vehicle object has crashed against a wall of the course from the front thereof. This could prevent the beginner from fully enjoying the competition. Thus, a control may be performed in which the wall of the course is detected by use of the processes as described above, and the own vehicle object is rotated without colliding with the wall of the course. Here, the own vehicle object may be rotated in the direction of the steering wheel input performed by the player at that time. If there is no steering wheel input performed by the player, the own vehicle object may be rotated in the direction of the steering wheel input that has been performed by the player before or at the previous time (last time). Then, after the own vehicle object is rotated up to the orientation at which the own vehicle object does not collide with the wall of the course, such a process may be ended.
In the examples described above, a case has been described in which the steering wheel input is an analog input made by means of the first analog stick63. Other than this, for example, an input made by means of the cross key65may be used in the steering operation. In this case, since the input is a digital input, the player steering wheel input value309becomes any one of values of −1, 0, and +1. However, also in this case, the correction process as described above can be applied.
In the embodiment described above, with respect to the course edge calculation, the edge of the course at two paths of each of before and after the current position of the own vehicle object101is calculated in real time by use of the path data306. Other than this, in another embodiment, with respect to the information indicative of the course edge, data may be provided in another form, without being limited to the form of the path data as described above. For example, edge data may be used in which coordinates of the course edge in the virtual space are listed. By use of such data, the position of the course edge may be determined, and determination of the off-course and calculation of the course edge orientation462and the like as described above may be performed.
In the examples described above, a race game is used. Other than this, for example, the processes described above can be applied to a driving game or the like that is not a race game. For example, the processes described above can be applied to a driving game in which a player sets a destination (corresponding to the goal of a race game) in a virtual space and causes an own vehicle object to travel in the virtual space.
In the embodiment described above, a case where a series of processes for correcting the steering wheel input value are performed in a single apparatus has been described. However, in another embodiment, the series of processes may be performed in an information processing system composed of a plurality of information processing apparatuses. For example, in an information processing system that includes a terminal side apparatus and a server side apparatus capable of communicating with the terminal side apparatus via a network, a pad of the series of processes may be performed by the server side apparatus. Alternatively, in an information processing system that includes a terminal side apparatus and a server side apparatus capable of communicating with the terminal side apparatus via a network, a main process of the series of processes may be performed by the server side apparatus, and a part of the series of the processes may be performed by the terminal side apparatus. Still alternatively, in the information processing system, a server side system may include a plurality of information processing apparatuses, and a process to be performed in the server side system may be divided and performed by the plurality of information processing apparatuses.
While this exemplary embodiment has been described in detail, the foregoing description is in all aspects illustrative and not restrictive. It is understood that numerous modifications and variations can be made without departing from the scope of this exemplary embodiment.
Claims
- The computer-readable non-transitory storage medium having stored therein a game program to be executed by a computer of a game apparatus configured to perform game processing of moving, on the basis of an operation performed by a player, a predetermined object in a predetermined course in a virtual space, the game program causing the computer to perform: obtaining an input amount according to an input for controlling a moving direction of the predetermined object based on the operation performed by the player;performing correction control of the input amount according to the input for controlling the moving direction, so as to cause the moving direction of the predetermined object to be close to a direction along a travelling direction which is a direction toward a destination in the predetermined course, by increasing/decreasing a predetermined correction value which is added to the input amount, on the basis of relationship between a current moving direction of the predetermined object and the travelling direction of the course;controlling movement of the predetermined object in the virtual space on the basis of the corrected input amount according to the input for controlling the moving direction, obtaining edge data indicative of positions of both edges in a width direction axis of the course;and in the performing of the correction control, the travelling direction of the course is calculated on the basis of the edge data, and the correction value is determined on the basis of relationship between the calculated travelling direction and the current moving direction of the predetermined object, wherein in the performing of the correction control, the correction value is determined on the basis of a distance between the predetermined object and an edge, of both edges in the width direction axis of the course, that is nearer to the predetermined object.
- The computer-readable non-transitory storage medium having stored therein a game program to be executed by a computer of a game apparatus configured to perform game processing of moving, on the basis of an operation performed by a player, a predetermined object in a predetermined course in a virtual space, the game program causing the computer to perform: obtaining an input amount according to an input for controlling a moving direction of the predetermined object based on the operation performed by the player;performing correction control of the input amount according to the input for controlling the moving direction, so as to cause the moving direction of the predetermined object to be close to a direction along a travelling direction which is a direction toward a destination in the predetermined course, by increasing/decreasing a predetermined correction value which is added to the input amount, on the basis of relationship between a current moving direction of the predetermined object and the travelling direction of the course;controlling movement of the predetermined object in the virtual space on the basis of the corrected input amount according to the input for controlling the moving direction, obtaining edge data indicative of positions of both edges in a width direction axis of the course;and in the performing of the correction control, the travelling direction of the course is calculated on the basis of the edge data, and the correction value is determined on the basis of relationship between the calculated travelling direction and the current moving direction of the predetermined object, wherein in the performing of the correction control, the correction value is determined on the basis of an angle between the moving direction of the predetermined object and the travelling direction at an edge, of both edges in the width direction axis of the course, that is nearer to the predetermined object.
- The computer-readable non-transitory storage medium having stored therein a game program to be executed by a computer of a game apparatus configured to perform game processing of moving, on the basis of an operation performed by a player, a predetermined object in a predetermined course in a virtual space, the game program causing the computer to perform: obtaining an input amount according to an input for controlling a moving direction of the predetermined object based on the operation performed by the player;performing correction control of the input amount according to the input for controlling the moving direction, so as to cause the moving direction of the predetermined object to be close to a direction along a travelling direction which is a direction toward a destination in the predetermined course, by increasing/decreasing a predetermined correction value which is added to the input amount, on the basis of relationship between a current moving direction of the predetermined object and the travelling direction of the course;controlling movement of the predetermined object in the virtual space on the basis of the corrected input amount according to the input for controlling the moving direction, obtaining edge data indicative of positions of both edges in a width direction axis of the course;and in the performing of the correction control, the travelling direction of the course is calculated on the basis of the edge data, and the correction value is determined on the basis of relationship between the calculated travelling direction and the current moving direction of the predetermined object, wherein the game program further causes the computer to perform further applying, to the predetermined object, an acceleration toward an inner side direction of the course and in a direction perpendicular to the travelling direction according to an edge, of both edges in the width direction axis of the course, that is nearer to the predetermined object, and in the controlling of the movement, the movement of the predetermined object is controlled on the basis of the corrected input amount according to the input for controlling the moving direction and the applied acceleration.
- The computer-readable non-transitory storage medium having stored therein the game program according to claim 3 , wherein in the applying of the acceleration, a magnitude of the acceleration to be applied to the predetermined object is determined in accordance with a distance between the predetermined object and the edge that is nearer to the predetermined object.
- The computer-readable non-transitory storage medium having stored therein a game program to be executed by a computer of a game apparatus configured to perform game processing of moving, on the basis of an operation performed by a player, a predetermined object in a predetermined course in a virtual space, the game program causing the computer to perform;obtaining an input amount according to an input for controlling a moving direction of the predetermined object based on the operation performed by the player;performing correction control of the input amount according to the input for controlling the moving direction, so as to cause the moving direction of the predetermined object to be close to a direction along a travelling direction which is a direction toward a destination in the predetermined course, by increasing/decreasing a predetermined correction value which is added to the input amount, on the basis of relationship between a current moving direction of the predetermined object and the travelling direction of the course;and controlling movement of the predetermined object in the virtual space on the basis of the corrected input amount according to the input for controlling the moving direction, wherein the correction control is performed when the predetermined object is present in a predetermined range from either one of both edges in a width direction axis of the course.
Disclaimer: Data collected from the USPTO and may be malformed, incomplete, and/or otherwise inaccurate.